12 Fluid Statics & the Hydrostatic Equation
Introduction
In fluid mechanics, a primary concern is describing and understanding the motion, or dynamics, of fluids, i.e., the field of fluid dynamics. First, remember that air is just one type of fluid, among many other types, including gases and liquids. However, if the fluid is not moving, it is commonly called a stagnant fluid. In that case, its characteristics and properties (e.g., pressure and density) can be described more easily using the principles of fluid statics.
A fluid in static equilibrium is one in which every fluid particle is either at rest or has no relative motion with respect to the other particles in the fluid. No viscous forces act on stagnant fluids because there is no relative motion between the fluid elements. Under these conditions, two types of forces on the fluid must be considered:
- Body forces, e.g., weight and inertial accelerations[1], and possibly electromagnetic forces.[2]
- Surface forces, e.g., the effects of an external pressure acting over an area.
The term hydrostatics is often used to refer to the field of fluid statics in general. Therefore, hydrostatic principles apply to all fluids, both gases and liquids. However, hydrostatic principles are frequently used to analyze liquids and other predominantly incompressible fluids, i.e., fluids that can be assumed to have constant density. The terms aerostatics and pneumatics are used when the principles of fluid statics are applied to compressible fluids, such as gases (e.g., air). Examples of engineering problems that could be analyzed by using hydrostatics and aerostatics include the following:
- The measurement of pressure using various types of manometry.
- The buoyancy and stability of floating objects, such as ships in the water, and lighter-than-air aircraft, such as balloons and blimps.
- The pressure and other fluid properties inside containers or vessels, including those caused by body forces or acceleration fields.
- The properties of the atmosphere on Earth and other planets.
- The transmission of forces and power using pressurized liquids and/or gases.
Learning Objectives
- Understand the meaning of a stagnant fluid and the underlying principles that apply to the behavior of static fluids.
- Derive, understand, and use the general equations for an aero-hydrostatic pressure field.
- Understand how to develop and apply the aero-hydrostatic equation.
- Use the principles of hydrostatics and the aero-hydrostatic equation to solve some fundamental engineering problems.
Pascal’s Law
The pressure at a point in a fluid at rest is equal in all directions; therefore, pressure is an isotropic scalar quantity, as formally embodied in Pascal’s Law. The derivation of Pascal’s Law proceeds by considering an infinitesimally small right-angled, three-dimensional fluid wedge at rest. However, the outcome is most easily obtained if the wedge is examined in just one view (or one plane), as shown in the figure below, which appears as a right-angled triangle with horizontal side length  , vertical side length
, vertical side length  , and diagonal length
, and diagonal length  , with the contained angle
, with the contained angle  .
.
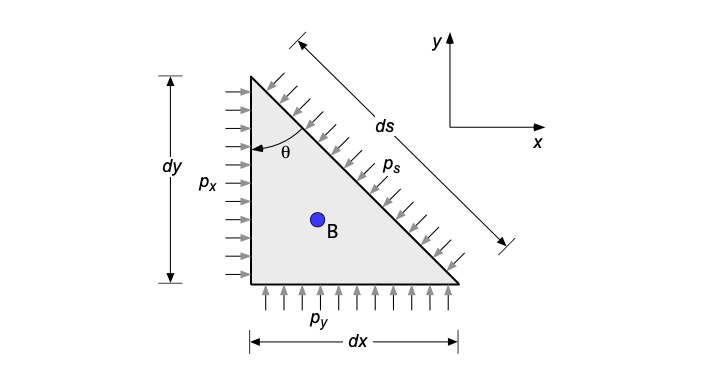
The pressures acting on the respective faces are  in the
in the  -direction,
-direction,  in the
in the  -direction, and
-direction, and  along the diagonal. Therefore, for horizontal pressure force equilibrium on the fluid per unit length (i.e., 1 unit into the page), then
along the diagonal. Therefore, for horizontal pressure force equilibrium on the fluid per unit length (i.e., 1 unit into the page), then
(1) 
For the vertical pressure force equilibrium per unit length, then
(2) 
where  is the weight of the fluid per unit length, i.e.,
is the weight of the fluid per unit length, i.e.,
(3) 
From the geometry of the triangle in the figure,  and
and  . Also, as the triangle shrinks to point B in the fluid, but such that
. Also, as the triangle shrinks to point B in the fluid, but such that  and become of
and become of  in accordance with the continuum assumption, then the product
in accordance with the continuum assumption, then the product  becomes negligible, i.e., the effects of the weight of fluid inside can be neglected. So, it becomes apparent that
becomes negligible, i.e., the effects of the weight of fluid inside can be neglected. So, it becomes apparent that
(4) 
and
(5) 
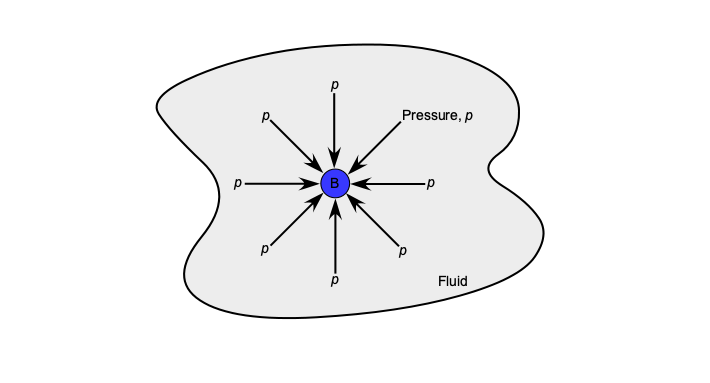
Therefore, from these two latter equations, the conclusion reached is that as the triangle shrinks to point B, then
(6) 
which states that the pressure at any point in a fluid at rest is the same in all directions, as illustrated in the figure below; this principle is known as Pascal’s Law. This latter derivation is easily generalized to three dimensions to show that  .
.
Aerostatic/Hydrostatic Pressure Field
Remember that pressure is a point property and can vary from point to point within the fluid. With the concept of pressure already discussed, the formal derivation of the equations for the pressure variation in a stagnant fluid can now proceed, and with a particular case of these equations, known as the aero-hydrostatic equation. Consider in the differential sense an infinitesimally small volume of fluid in a stagnant flow, i.e., a fluid element of volume  , as shown in the figure below. As the volume becomes infinitesimally small in the limit, it shrinks to point B such that
, as shown in the figure below. As the volume becomes infinitesimally small in the limit, it shrinks to point B such that  in accordance with the continuum assumption.
in accordance with the continuum assumption.
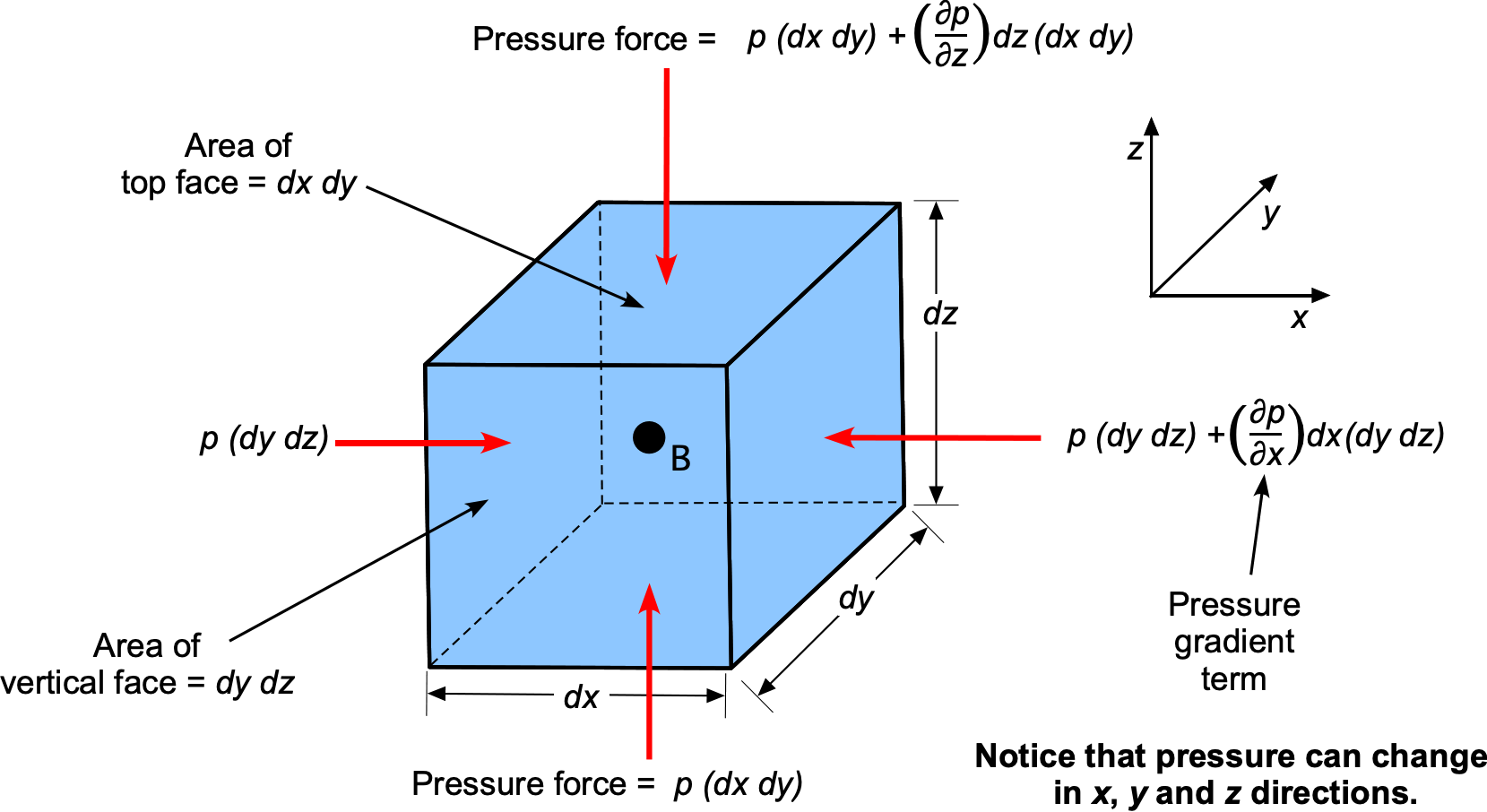
Acting on this small fluid volume are:
- Pressure forces from the surrounding fluid act normal to the surfaces and vary from point to point, i.e.,
 .
. - Body forces, in general, which are usually expressed as per unit mass of fluid, i.e.,
 per unit mass, where the mass in this case is
per unit mass, where the mass in this case is  .
. - A specific body force, in the form of gravity, manifests as a vertically downward force because of the weight of the fluid inside the element. This gravitational force can be written as
 per unit mass of fluid, i.e., the negative sign indicates that the force of gravity acts downward.
per unit mass of fluid, i.e., the negative sign indicates that the force of gravity acts downward.
Units of body force per unit mass
Notice that the units of a body force per unit mass have dimensions of acceleration, i.e., force per unit mass = force/mass = acceleration, so they have units of length/time². Therefore, body forces can also arise from the fluid’s inertial acceleration. For example, even when there is no relative motion between the fluid particles, the entire fluid mass can still be subjected to accelerations. While fluid forces from electromagnetic or electrostatic effects are not a consideration for air, certain types of fluids have properties that respond to such fields and may be explicitly selected for that purpose.
Consider the pressure forces in the direction, i.e., on the – face of area
face of area  . Let
. Let  be the change of pressure
be the change of pressure  with respect to . Notice that the partial derivative must be used because the pressure could vary in all three spatial directions. The net pressure force in the direction is
with respect to . Notice that the partial derivative must be used because the pressure could vary in all three spatial directions. The net pressure force in the direction is
(7) 
Similarly, for the direction, the net pressure force is
(8) 
and in the direction, the net pressure force is
(9) 
Therefore, the net resultant pressure force on the fluid element is
(10) ![\begin{eqnarray*} d\vec{F} & = & dF_x \, \vec{i} + dF_y \, \vec{j} + dF_z \, \vec{k} \\[6pt] & = & -\left( \frac{\partial p}{\partial x} \, \vec{i} + \frac{\partial p}{\partial y} \, \vec{j} + \frac{\partial p}{\partial z} \, \vec{k} \right) dx \, dy \, dz \nonumber \\[6pt] & = & -\nabla p \, (dx \, dy \, dz ) = -\nabla p \, d {\mathcal{V}} \end{eqnarray*}](https://eaglepubs.erau.edu/app/uploads/quicklatex/quicklatex.com-37f363bbf9677eb1ca31ca88822ff520_l3.svg "Rendered by QuickLaTeX.com")
where the gradient vector operator  (i.e., “del” or “grad”) has now been introduced.
(i.e., “del” or “grad”) has now been introduced.
If  is the mean density of the fluid element, then the total mass of the fluid element,
is the mean density of the fluid element, then the total mass of the fluid element,  , is
, is  , as shown in the figure below. Any coordinate system can be assumed, but is usually defined as positive in the vertical direction, where the gravitational acceleration would be
, as shown in the figure below. Any coordinate system can be assumed, but is usually defined as positive in the vertical direction, where the gravitational acceleration would be  . As such, gravity manifests as a vertically downward force from the weight of fluid inside the element, i.e., the net gravitational force is
. As such, gravity manifests as a vertically downward force from the weight of fluid inside the element, i.e., the net gravitational force is  .
.
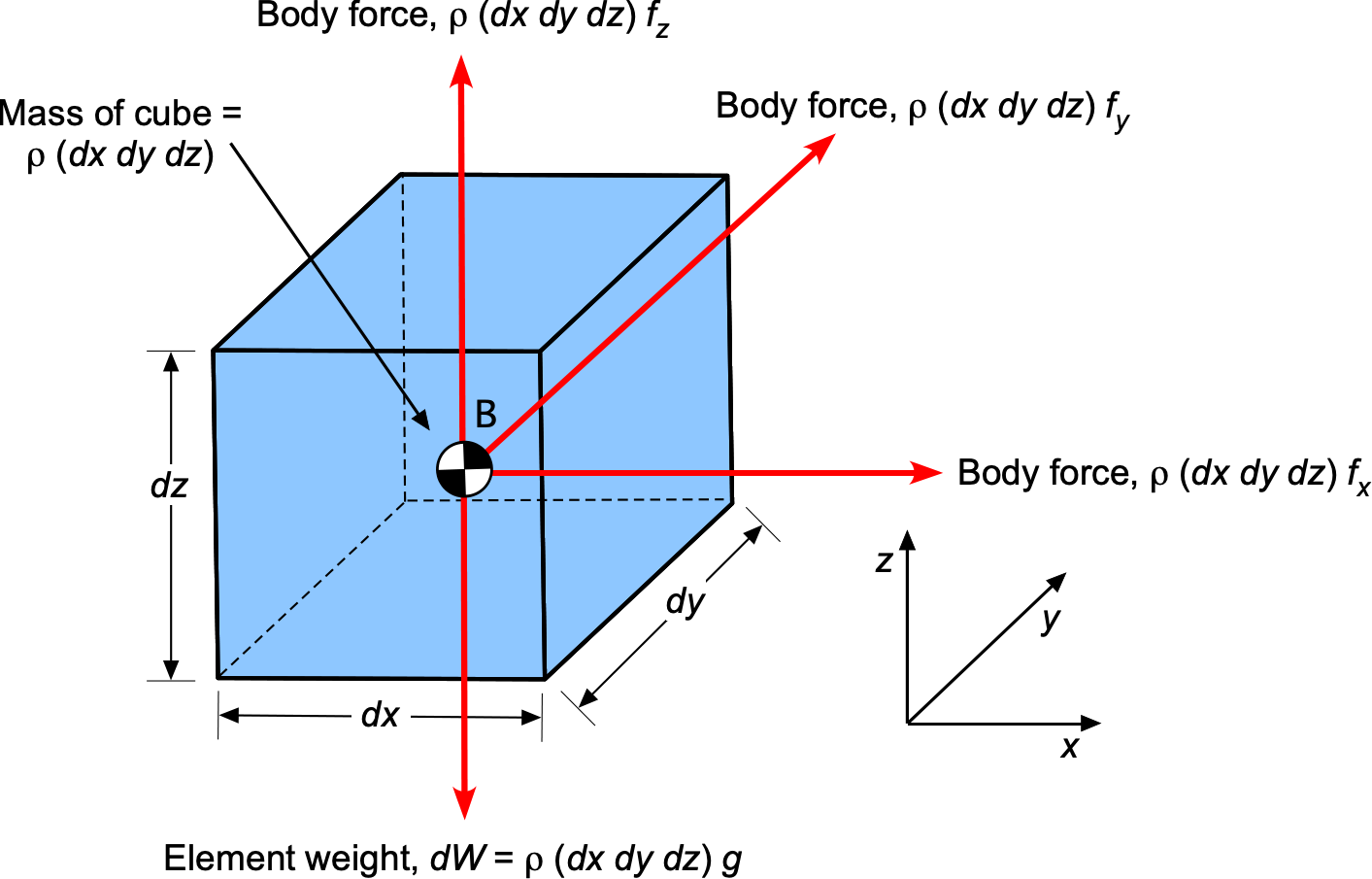
Furthermore, any additional body forces per unit mass acting on the element can be described as
(11) 
Now, if a fluid element is at rest and in equilibrium, then the sum of the pressure forces, the gravitational force, and the body force must be zero, i.e.,
(12) 
or
(13) 
In scalar form, the preceding vector equation can be written as
(14) ![\begin{eqnarray*} \frac{\partial p}{\partial x} & = & \varrho \, f_x \nonumber \\[6pt] \frac{\partial p}{\partial y} & = & \varrho \, f_y \nonumber \\[6pt] \frac{\partial p}{\partial z} & = & \varrho \, f_z -\varrho \, g \nonumber \end{eqnarray*}](https://eaglepubs.erau.edu/app/uploads/quicklatex/quicklatex.com-bce4f73c7237dc8b969fa78dfa8b3075_l3.svg "Rendered by QuickLaTeX.com")
Therefore, these three partial differential equations describe the pressure variations within a stagnant fluid. Notice that the center of gravity is at the centroid of the fluid element, so no gravitational moments are acting on the element.
Effects of Gravity Alone
If the only body force is the effects of gravitational acceleration or gravity force (the weight) acting on the element, then
(15) 
where  is the acceleration under gravity. Gravity manifests as a downward force, so there is a minus sign in the direction, i.e., it is downward because is measured positively upward. Therefore, in this case
is the acceleration under gravity. Gravity manifests as a downward force, so there is a minus sign in the direction, i.e., it is downward because is measured positively upward. Therefore, in this case
(16) 
or in scalar form
(17) ![\begin{eqnarray*} \frac{\partial p}{\partial x} & = & 0 \nonumber \\[6pt] \frac{\partial p}{\partial y} & = & 0 \nonumber \\[6pt] \frac{\partial p}{\partial z} & = & -\varrho \, g \nonumber \\ \end{eqnarray*}](https://eaglepubs.erau.edu/app/uploads/quicklatex/quicklatex.com-93e757a1916855c4747cc95704bb88fa_l3.svg "Rendered by QuickLaTeX.com")
Because the pressure does not depend on or , the above equation can now be written as
the ordinary differential equation
(18) 
This differential equation is known as the hydrostatic equation or the aero-hydrostatic equation. The aero-hydrostatic equation relates the change in pressure  in a fluid to a change in vertical height
in a fluid to a change in vertical height  . Equation 18 has numerous applications in manometry, hydrodynamics, and atmospheric physics, including the derivation of the properties of the International Standard Atmosphere (ISA), which is discussed later.
. Equation 18 has numerous applications in manometry, hydrodynamics, and atmospheric physics, including the derivation of the properties of the International Standard Atmosphere (ISA), which is discussed later.
Solutions to the Aero-Hydrostatic Equation
Several special cases of interest lead to helpful solutions to the aero-hydrostatic equation, namely the pressure changes for:
- A constant-density fluid, e.g., a liquid.
- A constant-temperature (isothermal) gas.
- A linear temperature gradient in a gas.
In the case of gases, once the pressure is known, the corresponding density and/or temperature of the gas can also be solved using the equation of state, i.e.,
(19) 
Remember that the equation of state relates the pressure,  , density, , and temperature,
, density, , and temperature,  , of a gas. If one of these quantities is unknown, the values of the other two can be used to determine it. In the case of liquids, there is no equivalent equation of state because they are incompressible, and their density is constant.
, of a gas. If one of these quantities is unknown, the values of the other two can be used to determine it. In the case of liquids, there is no equivalent equation of state because they are incompressible, and their density is constant.
Isodensity Fluid
If a fluid’s density is assumed to be a constant, e.g., a liquid, then Eq. 18 can be easily integrated from one height to another to find the corresponding change in pressure. Separating the variables gives
(20) 
and so
(21) 
or
(22) 
This result also means that
(23) 
or perhaps in a more familiar form, as
(24) 
where is “height.” This simple equation has many uses in various forms of manometry, but its use is limited to incompressible fluids, specifically liquids.
![\[ \]](https://eaglepubs.erau.edu/app/uploads/quicklatex/quicklatex.com-a49807391fa387510b42a56d0d5e0d98_l3.svg "Rendered by QuickLaTeX.com")
Isothermal Gas
If the temperature of a gas is assumed to be constant, i.e., what is known as an isothermal condition, then  constant. In this case, then
constant. In this case, then
(25) ![\begin{eqnarray*} \frac{dp}{dz} & = & -\varrho \, g \\[8pt] T & = & T_0 \\[8pt] p & = & \varrho \, R \, T \end{eqnarray*}](https://eaglepubs.erau.edu/app/uploads/quicklatex/quicklatex.com-30b5196847836aa3427a66e155e864b6_l3.svg "Rendered by QuickLaTeX.com")
By substituting for and assuming isothermal conditions, then
(26) 
Integrating from  to
to  where the pressures are
where the pressures are  and
and  , respectively, gives
, respectively, gives
(27) 
Performing the integration gives
(28) 
Therefore,
(29) 
Notice also that for isothermal conditions
(30) 
Linear Temperature Gradient in a Gas
If the temperature of a gas decreases linearly with height, i.e.,  where
where  is the thermal gradient or “lapse rate,” then in this case
is the thermal gradient or “lapse rate,” then in this case
(31) ![\begin{eqnarray*} \frac{dp}{dz} & = & -\varrho \, g \\[6pt] T & = & T_0 - \alpha \, z \\[6pt] p & = & \varrho \, R \, T \end{eqnarray*}](https://eaglepubs.erau.edu/app/uploads/quicklatex/quicklatex.com-e907984dde80e274bd4f64d77c50474e_l3.svg "Rendered by QuickLaTeX.com")
Substituting the other two equations into the differential equation gives
(32) 
which is the governing equation that must now be solved. By means of separation of variables and integrating from to where the pressures are and , respectively, gives
(33) 
Performing the integration gives for the left-hand side
(34) 
and for the right-hand side
(35) 
and so the final solution is
(36) 
The corresponding density ratio is
(37) 
Hydrostatic Paradox
Consider the situation depicted in the figure below, which shows three containers of different shapes filled with the same liquid. What are the pressure values on the container’s bottom in each case? The answer is that the pressures are all the same because the hydrostatic equation shows that the pressure at a point in a liquid depends only on the height of the liquid directly above it,  , and not at all on the container’s shape.
, and not at all on the container’s shape.
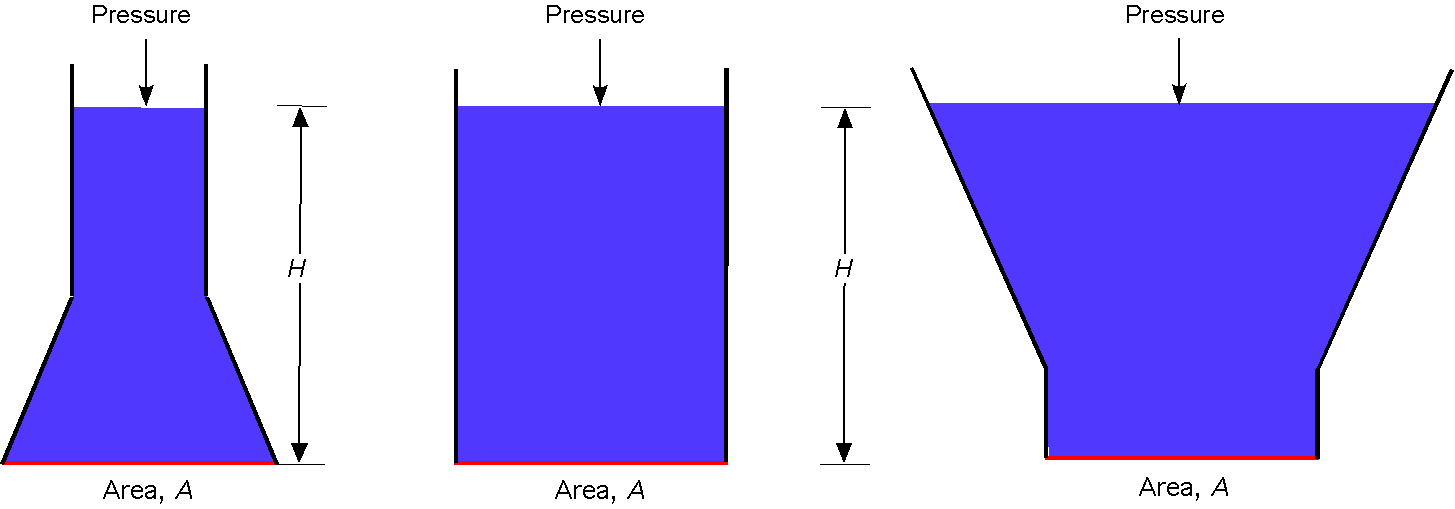
The pressure at the bottom of each container is  , where is the density of the liquid. If each container has the same area
, where is the density of the liquid. If each container has the same area  at the bottom, then the pressure force,
at the bottom, then the pressure force,  , on each container’s base is the same. This outcome is independent of the volume of liquid, and the weight of the liquid in each container differs, a phenomenon referred to as the hydrostatic paradox.
, on each container’s base is the same. This outcome is independent of the volume of liquid, and the weight of the liquid in each container differs, a phenomenon referred to as the hydrostatic paradox.
Check Your Understanding #1 – Pressure on the bottom of a container
Consider a cylindrical tank containing two liquids of densities  and
and  , as shown in the figure below. Determine an expression for the pressure on the bottom of the tank,
, as shown in the figure below. Determine an expression for the pressure on the bottom of the tank,  . If the heights are
. If the heights are  cm and
cm and  cm, and the densities are
cm, and the densities are  kg/m
kg/m and
and  kg/m. Assume standard atmospheric pressure,
kg/m. Assume standard atmospheric pressure,  kPa. If the liquids are mixed to form a homogeneous fluid of density
kPa. If the liquids are mixed to form a homogeneous fluid of density  , what will be the pressure on the bottom of the tank?
, what will be the pressure on the bottom of the tank?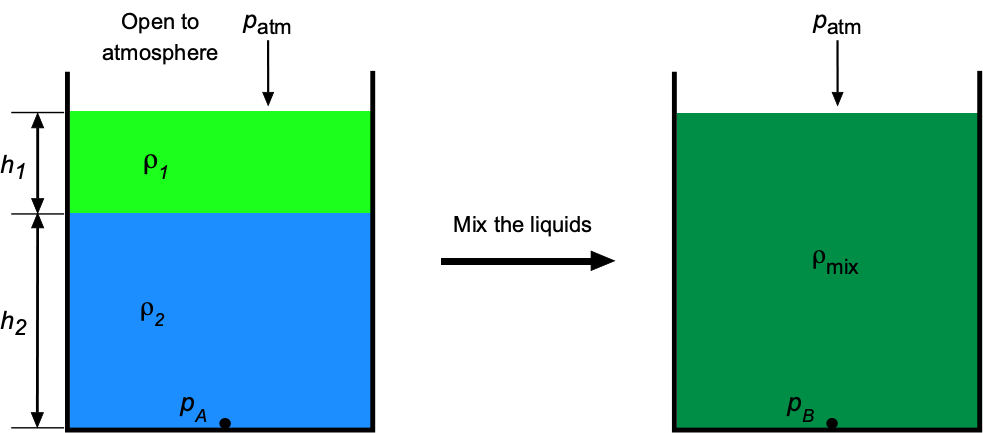
Show solution/hide solution.
For the unmixed liquids, the static pressure on the bottom of the tank will be
![\[ p_A = p_{\rm atm} + \varrho_1 \, g \, h_1 + \varrho_2 \, g \, h_2 \]](https://eaglepubs.erau.edu/app/uploads/quicklatex/quicklatex.com-aef74defeb653a23db301ae0e40ef0b2_l3.svg "Rendered by QuickLaTeX.com")
Inserting the values gives
![\[ p_A = 101.325 \times 10^3 + 970.0 \times 9.81 \times 0.121 + 1,100 \times 9.81 \times 0.134 = 103.791\mbox{kPa} \]](https://eaglepubs.erau.edu/app/uploads/quicklatex/quicklatex.com-3b5b6adf5d33c2346076add03fb3c25d_l3.svg "Rendered by QuickLaTeX.com")
If the two liquids are homogeneously mixed, then
![\[ p_B = p_{\rm atm} + \varrho_{\rm mix} \, g \left( h_1 + h_2 \right) \]](https://eaglepubs.erau.edu/app/uploads/quicklatex/quicklatex.com-6b5c57e87a223ef332b9964868d02840_l3.svg "Rendered by QuickLaTeX.com")
The mixing will not change the net mass of the two liquids, so by conservation of mass, then
![\[ M = \left( \varrho_1 \, g \, h_1 + \varrho_2 \, g \, h_2 \right) A = \varrho_{\rm mix} \, g \left( h_1 + h_2 \right) A \]](https://eaglepubs.erau.edu/app/uploads/quicklatex/quicklatex.com-fbeee7e27e7a76e34ba04167db2d27a8_l3.svg "Rendered by QuickLaTeX.com")
where is the cross-sectional area of the tank. Therefore,
![\[ \varrho_{\rm mix} \, g \, \left( h_1 + h_2 \right) = \left( \varrho_1 \, g \, h_1 + \varrho_2 \, g \, h_2 \right) \]](https://eaglepubs.erau.edu/app/uploads/quicklatex/quicklatex.com-977496898eed5014023081777f41b415_l3.svg "Rendered by QuickLaTeX.com")
Substituting into the expression for  gives
gives
![\[ p_B = p_{\rm atm} + \varrho_{\rm mix} \, g \left( h_1 + h_2 \right) = p_{\rm atm} + \left( \varrho_1 \, g \, h_1 + \varrho_2 \, g \, h_2 \right) = p_A \]](https://eaglepubs.erau.edu/app/uploads/quicklatex/quicklatex.com-d6a703ada0fffbac9dc2d98239c545ae_l3.svg "Rendered by QuickLaTeX.com")
Therefore, the pressure at the bottom of the container remains unchanged when the two liquids are mixed.
Archimedes’ Principle
Archimedes’ principle (also spelled Archimedes’s principle) is commonly used to solve hydrostatic problems [3]. This principle states that the upward or buoyancy force exerted on a body immersed in a fluid equals the weight of the fluid that the body displaces. This outcome occurs whether the body is wholly or partially submerged in the fluid and is independent of the body’s shape. The resulting force also acts upward at the center of buoyancy of the displaced fluid, which is located at the center of mass of the displaced fluid. This principle is commonly applied to problems involving flotation, or the movement of bodies through a fluid, such as boats, ships, balloons, and airships. Balloons and airships are known as aerostats or lighter-than-air (LTA) aircraft in aviation.
Derivation of Archimedes’ Principle
Having introduced the concept of hydrostatic pressure and the hydrostatic equation, the derivation of Archimedes’ principle is now relatively straightforward because it will be apparent that the source of buoyancy is a consequence of a pressure difference acting on the body. To this end, consider a solid body wholly immersed in a fluid of constant density, as shown in the figure below. The elemental volume,  has linear dimensions of , , and
has linear dimensions of , , and  .
.
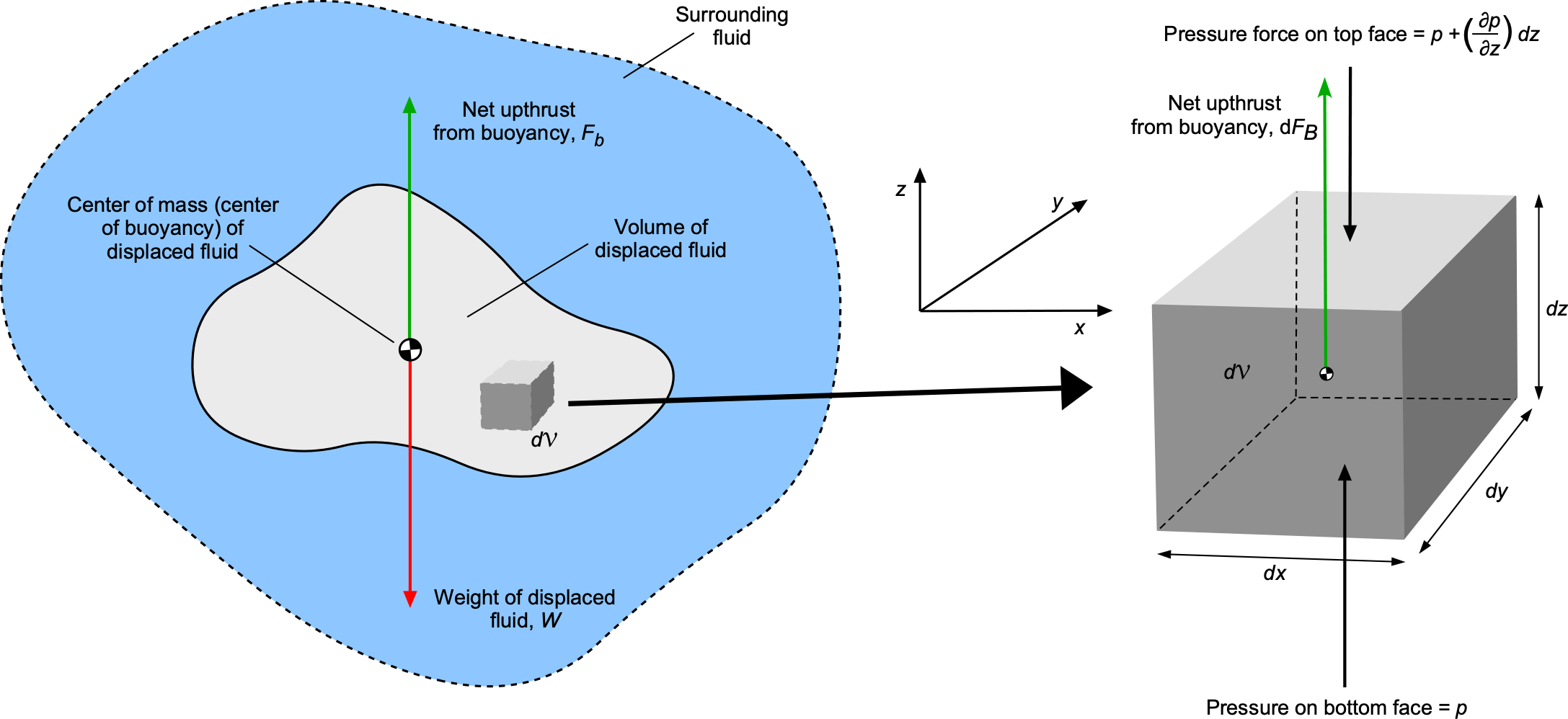
The hydrostatic pressure force on the top face of the volume will be lower than that on the bottom face, with the difference providing the upthrust (buoyancy) on the body. It will be apparent that there are no net forces on in the and directions. The net pressure force in the upward direction, which is the elemental buoyancy force,  , will be
, will be
(38) 
Using the hydrostatic equation gives
(39) 
Therefore, the buoyancy force on  is
is
(40) 
Therefore, the total buoyancy force on the immersed body is
(41) 
Because the shape of the body is arbitrary, then
(42) 
which is the net weight of the fluid of density displaced by the volume  of the immersed body.
of the immersed body.
Therefore, the derivation concludes by stating that the upthrust on the immersed body is equal to the weight of the fluid displaced by the body, i.e., Archimedes’ principle, which is a consequence of the net difference in hydrostatic pressure force acting on the body. This latter result applies to an immersed body of any shape, including one partially submerged in a fluid.
Check Your Understanding #2 – Buoyancy force
Which balloon shown in the figure below experiences the most significant buoyancy force? Each balloon contains the same volume of fluid and is surrounded by air.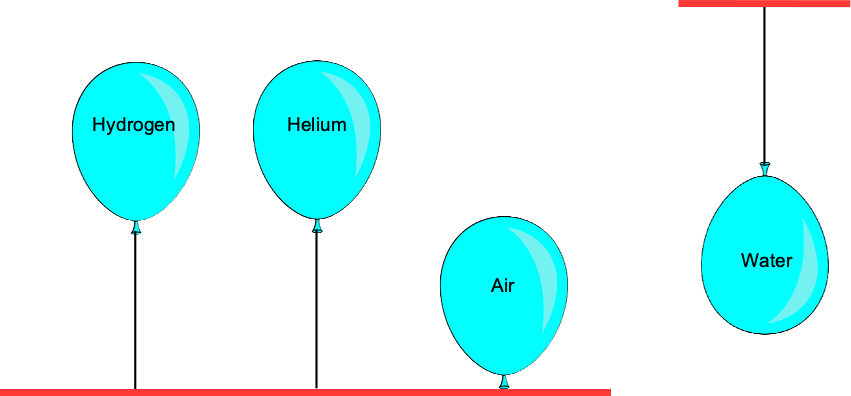
Show solution/hide solution.
The balloons experience the same buoyancy force because they all displace the same volume of air. An assumption is that the water balloon does not stretch with the weight of water. According to Archimedes’ principle, the buoyancy force is equal to the weight of the fluid displaced, not the weight of the fluid inside the balloon. The net upforce, however, does depend on the fluid inside the balloon, so the balloon with the lightest gas (hydrogen) will be the largest. Note: This was not meant to be a trick question.
Buoyancy & Floatation
To better illustrate the concept of buoyancy, consider the scenarios shown in the figure below. The object’s volume is the same in each case, but its weight differs, ranging from  (the heaviest) to
(the heaviest) to  (the lightest). If the object is entirely immersed in the fluid, then the upthrust or the buoyancy force,
(the lightest). If the object is entirely immersed in the fluid, then the upthrust or the buoyancy force,  , will be
, will be
(43) 
where is the volume of the object and hence the displaced fluid, and  is the density of the displaced fluid. Remember that the buoyancy force depends on the weight of the fluid displaced by the object, not the weight of the object itself.
is the density of the displaced fluid. Remember that the buoyancy force depends on the weight of the fluid displaced by the object, not the weight of the object itself.
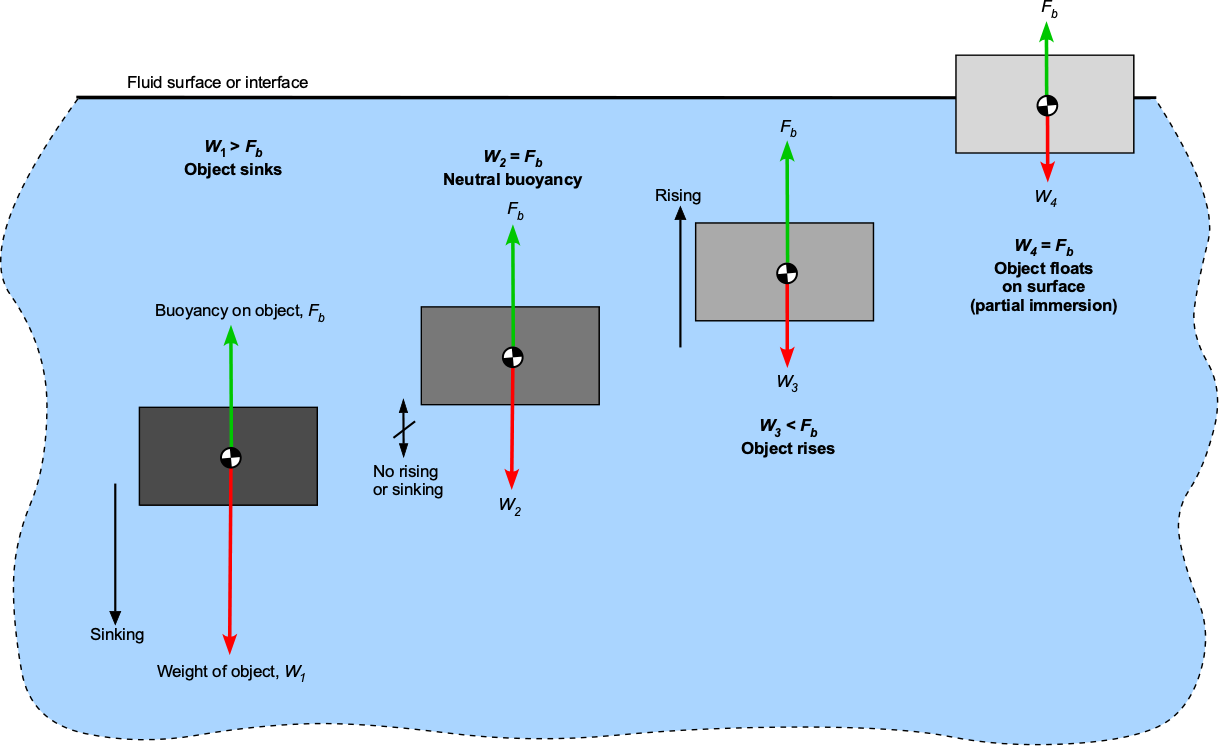
The net force on the body, therefore, is
(44) 
It will begin to sink if the object is heavier than the buoyancy force, i.e.,  . If the object has a weight equal to the buoyancy force, i.e.,
. If the object has a weight equal to the buoyancy force, i.e.,  , it will have neutral buoyancy and reach an immersed depth where it will neither sink nor rise in the fluid, i.e., neutral buoyancy like a submarine. The body will begin to rise in the fluid if the buoyancy force exceeds the weight, i.e.,
, it will have neutral buoyancy and reach an immersed depth where it will neither sink nor rise in the fluid, i.e., neutral buoyancy like a submarine. The body will begin to rise in the fluid if the buoyancy force exceeds the weight, i.e.,  . Eventually, if the body is made light enough, it will float at the fluid interface. In this case, only partial immersion may be needed to displace the fluid required to generate the buoyancy force that balances its weight, as in a boat or a ship.
. Eventually, if the body is made light enough, it will float at the fluid interface. In this case, only partial immersion may be needed to displace the fluid required to generate the buoyancy force that balances its weight, as in a boat or a ship.
As shown in the figure below, consider an LTA aircraft floating in the air. The gas envelope is filled with a volume of another, lighter gas, called the buoyant gas. In the case of the airship, the gas inside will be helium, which is eight times lighter than air. In the case of a balloon, the gas is hot air, which has only a slightly lower density than the surrounding cooler air, depending on the air temperature. In either case, the upthrust or buoyancy lift force equals the weight of the displaced air. Often, this upforce is referred to as an aerostatic lift because it does not depend on motion.
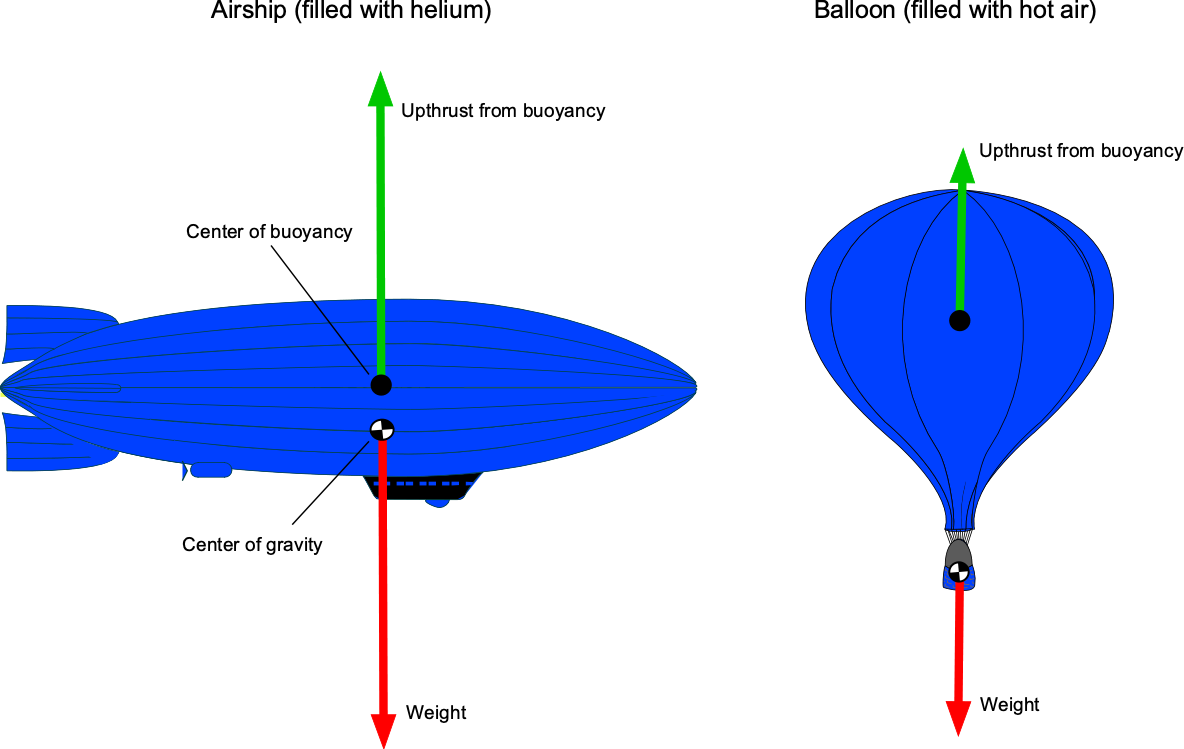
The LTA aircraft’s net weight will include the weight of its structure, payload, fuel, and other components, as well as the weight of the gas contained within the gas envelope. Therefore, the net force acting will equal the difference between the net weight of the vehicle minus the weight of the displaced air (i.e., the buoyancy or “upthrust”). If the upthrust is greater than the weight, the aircraft will rise; if it is less, it will descend. Equilibrium, or neutral buoyancy, will be achieved when these two forces are equal and are in exact vertical balance.
These aerostatic principles can be further developed by using Archimedes’ principle. The net upforce (aerostatic lift),  , will be equal to the net weight of the air displaced, less the weight of the gas inside the envelope, i.e., the aerostatic lift is
, will be equal to the net weight of the air displaced, less the weight of the gas inside the envelope, i.e., the aerostatic lift is
(45) 
where is the volume of the envelope containing the buoyant gas,  is the density of the buoyant gas, and
is the density of the buoyant gas, and  is the density of the displaced air. If the weight of the aircraft is
is the density of the displaced air. If the weight of the aircraft is  , then for vertical force equilibrium and neutral buoyancy, then
, then for vertical force equilibrium and neutral buoyancy, then
(46) 
Therefore, the volume of the buoyant gas can be determined to provide a specific buoyancy force that overcomes the weight of the object. This is the fundamental principle of aerostatic lift production on all types of LTA aircraft.
Check Your Understanding #3 – Buoyancy of an airship
An airship has an aerostatic gas envelope with a volumetric capacity of 296,520 ft³, filled with helium. If the airship has an empty weight of 14,188 lb and a maximum fuel load of 960 lb, what would be the maximum payload the airship could carry? Assume MSL ISA standard atmospheric conditions. The density of helium can be assumed to be 0.0003192 slugs/ft3. Ignore the effects of any ballast.
Show solution/hide solution.
The hydrostatic principle of buoyancy is applicable here. Using Archimedes’ principle, the upforce (aerostatic lift), , on the airship will be equal to the net weight of the fluid displaced minus the weight of the gas inside the envelope, i.e.,
![\[ L = \left( \varrho_{\rm air} - \varrho_{\rm He} \right) g \, {\cal{V}} \]](https://eaglepubs.erau.edu/app/uploads/quicklatex/quicklatex.com-59dc37554635587519679b86ae0d7293_l3.svg "Rendered by QuickLaTeX.com")
where is the volume of the gas envelope. The gross weight of the airship will be the sum of the empty weight,  , plus the fuel weight,
, plus the fuel weight,  , plus the payload,
, plus the payload,  , i.e.,
, i.e.,
![\[ W = W_e + W_f + W_p \]](https://eaglepubs.erau.edu/app/uploads/quicklatex/quicklatex.com-2d06bf818b69de98f2f0969038015d27_l3.svg "Rendered by QuickLaTeX.com")
For vertical force equilibrium at takeoff with neutral buoyancy, then  , so
, so
![\[ W_e + W_f + W_p = \left( \varrho_{\rm air} - \varrho_{\rm He} \right) g {\, \cal{V}} \]](https://eaglepubs.erau.edu/app/uploads/quicklatex/quicklatex.com-604a96d9f06058308a1fcc64c7ced5cb_l3.svg "Rendered by QuickLaTeX.com")
Rearranging to solve for the payload weight gives
![\[ W_p = \left( \varrho_{\rm air} - \varrho_{\rm He} \right) g \, {\cal{V}} - W_e - W_f \]](https://eaglepubs.erau.edu/app/uploads/quicklatex/quicklatex.com-c9cff517c2c872ed51a399fe11cde08e_l3.svg "Rendered by QuickLaTeX.com")
Using the numerical values supplied gives
![\[ W_p = \left( 0.002378 - 0.0003192 \right) \times 32.17 \times 296,520 - 14,188.0 - 960.0 = 4,497.45~\mbox{lb} \]](https://eaglepubs.erau.edu/app/uploads/quicklatex/quicklatex.com-174a2409d73343c6596431f07b1d4af3_l3.svg "Rendered by QuickLaTeX.com")
Therefore, the maximum payload at the takeoff point would be 4,497 lb.
Horizontal Buoyancy Effects
Horizontal buoyancy occurs whenever pressure gradients are formed and act laterally in a fluid, i.e., in the  –
– plane rather than vertically. In many cases, horizontal pressure gradients arise from inertial accelerations and are prevalent in various aerospace contexts.
plane rather than vertically. In many cases, horizontal pressure gradients arise from inertial accelerations and are prevalent in various aerospace contexts.
For example, flight maneuvers in an airplane produce various inertial “g” loads that create pressure gradients in fuel tanks, oil reservoirs, and other fluid systems, other than vertical gradients. These gradients result in fluid-level variations and slosh, which must be considered in the design of fluid management systems and when installing baffles and vents. Another example is the high acceleration experienced by launch vehicles during flight. During ascent, the vehicle can experience loads of 3g to 5g in the non-inertial frame of reference fixed to the tank, which appears as a uniform body acceleration in the opposite direction of flight. As the vehicle gains horizontal speed, the effective “gravity” combines with Earth’s gravity to create a steep pressure gradient along and across the tank, pushing the liquid propellant toward the base and the pressurant gas toward the opposite end. These horizontal pressure gradients must be considered in the design of the tank geometry, propellant management devices, and the venting system.
The horizontal buoyancy force on an elemental fluid volume,  , that is produced by a pressure gradient in the -direction is
, that is produced by a pressure gradient in the -direction is
(47) 
and the corresponding force in the -direction is
(48) 
In terms of per unit mass  , the horizontal buoyancy accelerations are
, the horizontal buoyancy accelerations are
(49) 
These expressions are the horizontal analog of Archimedes’ principle and the hydrostatic equation.
Linear Acceleration of the Reference Frame
Suppose the entire coordinate frame accelerates horizontally with constant components  and
and  . In this non-inertial frame, an elemental volume experiences inertial (“fictitious”) forces, i.e.,
. In this non-inertial frame, an elemental volume experiences inertial (“fictitious”) forces, i.e.,
(50) 
In terms of per unit mass, then
(51) 
These inertial forces can be written as effective pressure gradients that are identical in form to the buoyancy relations given above, i.e.,
(52) 
Accelerations in a Rotating Frame
For steady rotation with angular velocity  about the -axis, a fluid element at radius
about the -axis, a fluid element at radius  experiences an outward specific acceleration
experiences an outward specific acceleration  per unit mass. Static equilibrium requires a balancing radial pressure gradient, i.e.,
per unit mass. Static equilibrium requires a balancing radial pressure gradient, i.e.,
(53) 
or
(54) 
which integrates to
(55) 
If the fluid is a liquid that has a free surface exposed to atmospheric pressure  , using the hydrostatic relation
, using the hydrostatic relation  gives
gives
(56) 
Therefore, the free surface is a paraboloid of revolution with a curvature given by  .
.
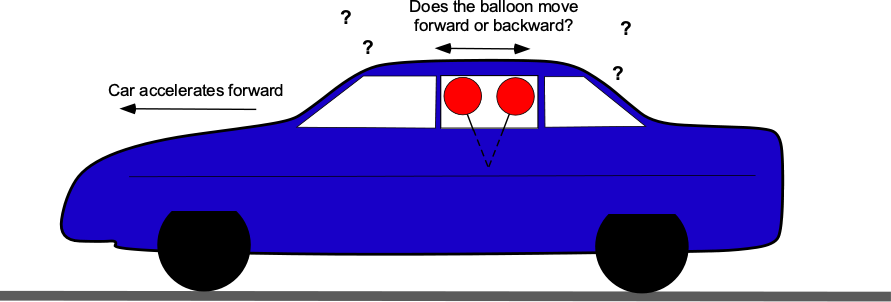
Check Your Understanding #4 – Baffling balloon behavior!
A helium-filled party balloon tied to a string attached to the seat floats inside a car. If the vehicle accelerates forward, in which direction will the balloon move? If you would like a demonstration, you can use this link: Baffling Balloon Behavior. Can you explain the physics of this behavior using the principles of hydrostatics?
Show solution/hide solution.
The answer is obtained by using Archimedes’ principle. The net up-force from buoyancy, , on the balloon will be equal to the net weight of the air displaced, less the weight of the helium inside the balloon, as shown in the figure below, i.e.,
![\[ L = \varrho_{\rm air} \, g \, {\cal{V}} - \varrho_{\rm He} \, g \, {\cal{V}} = \left( \varrho_{\rm air} - \varrho_{\rm He} \right) g \, {\cal{V}} \]](https://eaglepubs.erau.edu/app/uploads/quicklatex/quicklatex.com-f82f8e37e698c3dc1f3a49e7d1e643f0_l3.svg "Rendered by QuickLaTeX.com")
where is the volume of the balloon, is the density of air, and  is the density of the helium gas inside the balloon. We are told to neglect the weight of the balloon itself. Therefore, the tension, , on the string is
is the density of the helium gas inside the balloon. We are told to neglect the weight of the balloon itself. Therefore, the tension, , on the string is
![\[ T = L = \left( \varrho_{\rm air} - \varrho_{\rm He} \right) g \, {\cal{V}} \]](https://eaglepubs.erau.edu/app/uploads/quicklatex/quicklatex.com-92139a12967b7efb8c8ebbd536242204_l3.svg "Rendered by QuickLaTeX.com")
If the car moves forward with a constant acceleration,  , in the direction, then the balance of forces on the balloon will change, as shown in the figure. Because the air mass inside the car is stagnant, the acceleration to the left (in the positive direction) manifests as an inertial body force on the stagnant air, directed to the right (in the negative direction). This acceleration will create a horizontal pressure gradient (the higher pressure biased to the rear of the car) that will lead to a net horizontal buoyancy force directed toward the left, i.e.,
, in the direction, then the balance of forces on the balloon will change, as shown in the figure. Because the air mass inside the car is stagnant, the acceleration to the left (in the positive direction) manifests as an inertial body force on the stagnant air, directed to the right (in the negative direction). This acceleration will create a horizontal pressure gradient (the higher pressure biased to the rear of the car) that will lead to a net horizontal buoyancy force directed toward the left, i.e.,
![\[ F_x = \left( \varrho_{\rm air} - \varrho_{\rm He} \right) a \, {\cal{V}} \]](https://eaglepubs.erau.edu/app/uploads/quicklatex/quicklatex.com-6afd83e186ad99bf10adacfc2dd8f961_l3.svg "Rendered by QuickLaTeX.com")
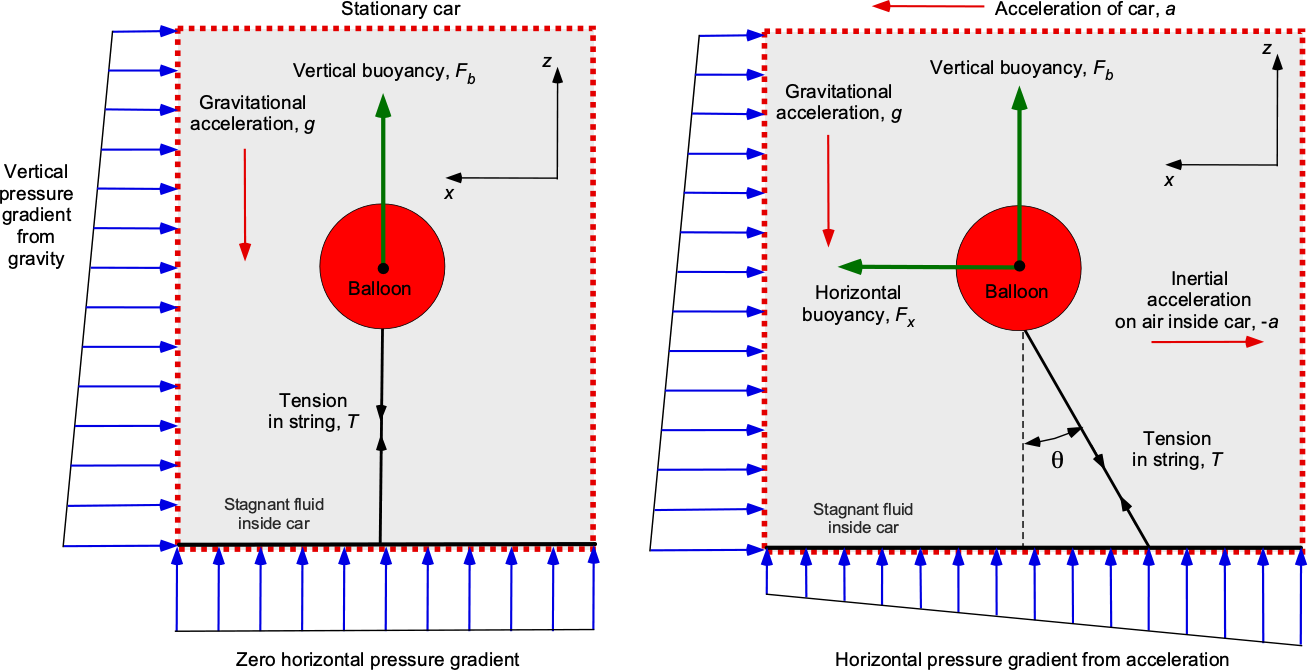 In other words, because of the much lighter helium gas in the balloon, the horizontal buoyancy force in the air is greater than its inertial force. Therefore, it can be concluded that the helium balloon will lean forward relative to the car when accelerating forward. Finding the angle of the string for horizontal and vertical force equilibrium is just the application of statics, i.e.,
In other words, because of the much lighter helium gas in the balloon, the horizontal buoyancy force in the air is greater than its inertial force. Therefore, it can be concluded that the helium balloon will lean forward relative to the car when accelerating forward. Finding the angle of the string for horizontal and vertical force equilibrium is just the application of statics, i.e.,
![\[ T \cos \theta = F_x \]](https://eaglepubs.erau.edu/app/uploads/quicklatex/quicklatex.com-977384759a4af57c666198da4d69014d_l3.svg "Rendered by QuickLaTeX.com")
and
![\[ T \sin \theta = L \]](https://eaglepubs.erau.edu/app/uploads/quicklatex/quicklatex.com-f48ceddde189ee456686a13e2375f19e_l3.svg "Rendered by QuickLaTeX.com")
Therefore,
![\[ \tan \theta = \frac{F_x}{L} = \frac{ \left( \varrho_{\rm air} - \varrho_{\rm He} \right) a \, {\cal{V}}} {\left( \varrho_{\rm air} - \varrho_{\rm He} \right) \, g {\cal{V}}} = \frac{a}{g} \]](https://eaglepubs.erau.edu/app/uploads/quicklatex/quicklatex.com-59bd87868f5f7bb14204726585605db6_l3.svg "Rendered by QuickLaTeX.com")
So, finally, the angle of the string is
![\[ \theta = \tan^{-1} \left( \frac{a}{g} \right) \]](https://eaglepubs.erau.edu/app/uploads/quicklatex/quicklatex.com-7f55caaf0edc7de89af367ea5f2010cc_l3.svg "Rendered by QuickLaTeX.com")
Pressure Forces on Submerged Surfaces
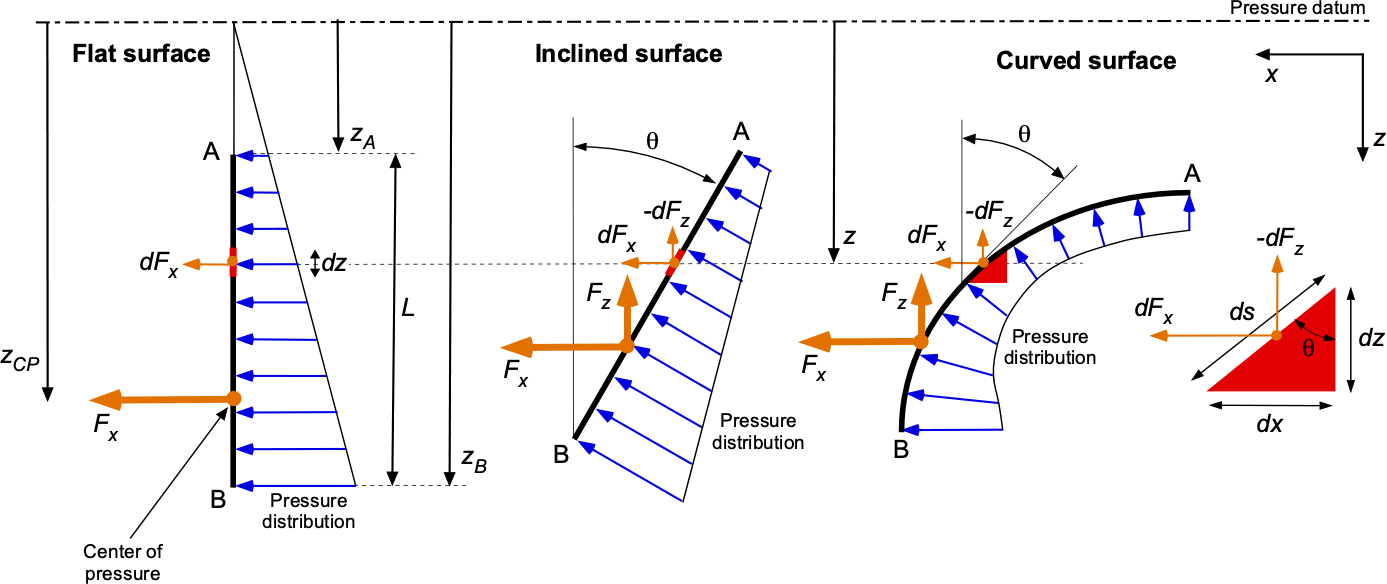
The summation of hydrostatic pressure forces acting over surfaces is a frequent problem in engineering. Such pressure distributions are typically non-uniform, so the net forces and moments acting on the surface must be obtained by integration. Consider the scenarios shown in the figure below, which depict the hydrostatic pressure distributions over a vertical flat surface, an inclined flat surface, and a curved surface.
Vertical Flat Surfaces
In the case of the vertical flat surface, the pressure force  acting on the elemental length at depth from the pressure datum will be
acting on the elemental length at depth from the pressure datum will be
(57) 
where ‘per unit length’ means 1 unit into the screen or page. The total force acting on the surface will be
(58) 
Performing the integration gives
(59) ![\begin{equation*} F_x = \varrho \, g \left[ \frac{z^2}{2} \right]_{z_A}^{z_b} = \varrho \, g \left( \frac{ (z_A - z_B)^2 }{2} \right) = \varrho \, g \left( \frac{L^2}{2} \right) \quad \mbox{per unit length} \end{equation*}](https://eaglepubs.erau.edu/app/uploads/quicklatex/quicklatex.com-73033cbf6da1eef440dc52eb5deea552_l3.svg "Rendered by QuickLaTeX.com")
The center of pressure on the plate can be found by taking moments about the pressure datum, i.e.,
(60) 
Performing the integration gives
(61) ![\begin{equation*} M = \varrho \, g \left[ \frac{z^3}{3} \right]_{z_2}^{z_1} = \varrho \, g \left( \frac{(z_2 - z_1)^3}{3} \right) = \varrho \, g \left( \frac{L^3}{3} \right) \quad \mbox{per unit length} \end{equation*}](https://eaglepubs.erau.edu/app/uploads/quicklatex/quicklatex.com-ecdd8351349be8ef43d49cdb0d384c0f_l3.svg "Rendered by QuickLaTeX.com")
Therefore, the center of pressure (cp) will be at
(62) 
which is located at a depth of 2/3 the length of the plate below point A.
Inclined Flat Surfaces
In the case of an inclined flat surface, the pressure forces per unit length (or span) acting on the elemental length at depth from the pressure datum will be
(63) ![\begin{eqnarray*} dF_x & = & \varrho \, g \, z \, \sin \theta \, dz\\[6pt] -dF_z & = & \varrho \, g \, z \, \cos \theta \, dz \end{eqnarray*}](https://eaglepubs.erau.edu/app/uploads/quicklatex/quicklatex.com-3a61cfb814c5b2c9b152f0807e4654f4_l3.svg "Rendered by QuickLaTeX.com")
The total force components acting on the surface will be
(64) ![\begin{eqnarray*} F_x & = & \varrho \, g \sin \theta \int_{z_A}^{z_B} z \, dz \\[6pt] -F_z & = & \varrho \, g \cos \theta \int_{z_A}^{z_B} z \, dz \end{eqnarray*}](https://eaglepubs.erau.edu/app/uploads/quicklatex/quicklatex.com-b356ae0ca284c6babfcab627c2a3c45e_l3.svg "Rendered by QuickLaTeX.com")
The  and
and  terms are taken outside the integral because is a constant. Performing the integration gives
terms are taken outside the integral because is a constant. Performing the integration gives
(65) ![\begin{eqnarray*} F_x & = & \varrho \, g \sin \theta \left( \frac{L^2}{2} \right) \\[6pt] -F_z & = & \varrho \, g \cos \theta \left( \frac{L^2}{2} \right) \end{eqnarray*}](https://eaglepubs.erau.edu/app/uploads/quicklatex/quicklatex.com-43bae82b41a68560dd8aa63e75bffea2_l3.svg "Rendered by QuickLaTeX.com")
The center of pressure (cp) on the plate (assume two-dimensional) can be found by taking moments about the pressure datum, as done previously, which in this case is
(66) 
The process can be extended for plates at any orientation in three-dimensional space.
Curved Surfaces
In the cases of curved surfaces, there are only exact solutions if the geometry lends itself to such, i.e., circular arcs. In this case, the angle terms must be held with the integral such that the total force components acting on the surface will be
(67) ![\begin{eqnarray*} F_x & = & \varrho \, g \int_{z_A}^{z_B} z \, dx = \varrho \, g \int_{z_A}^{z_B} z \sin \theta \, dz \\[6pt] -F_z & = & \varrho \, g \int_{z_A}^{z_B} z \, dy = \varrho \, g \int_{z_A}^{z_B} z \cos \theta \, dz \end{eqnarray*}](https://eaglepubs.erau.edu/app/uploads/quicklatex/quicklatex.com-b7cc18f2018e23b92cdb178e66e9eef7_l3.svg "Rendered by QuickLaTeX.com")
The net force is, therefore,
(68) 
Another approach is to perform the integration using the surface expressed in terms of its unit normal vectors,  , i.e.,
, i.e.,
(69) 
Check Your Understanding #5 – Moment on a submerged gate
The figure below illustrates that a heavy swinging gate functions as an overpressure release valve. The gate is = 2 m long and = 4 m wide. Assume the gate can freely pivot about the hinge and that there is a suitable gasket around its edges to keep it watertight. The water is in a large tank that connects to the gate through a channel with a height of = 0.5 m. The gate must open if the height of the water,  , exceeds 5 m.
, exceeds 5 m.
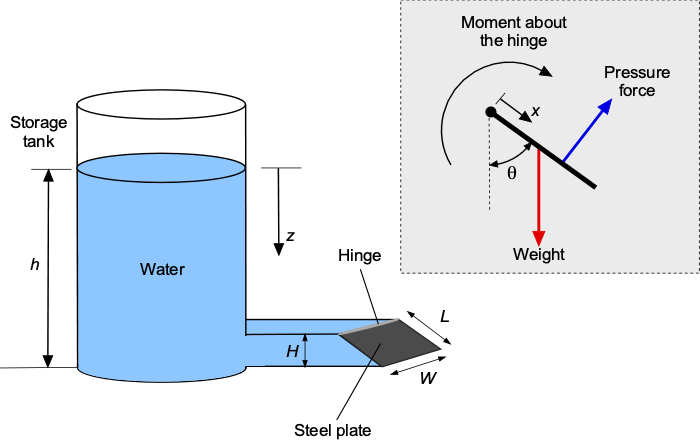 Determine the equation describing the hydrostatic pressure force on the gate. Find the resultant moment ( torque) about the hinge from the action of the hydrostatic pressure on the gate. What thickness would be needed if the gate is made of solid plate steel (density = 7.5 grams/cm)? Assume that the effects of air pressure on the gate can be neglected compared to the effects of water and that the density of water is
Determine the equation describing the hydrostatic pressure force on the gate. Find the resultant moment ( torque) about the hinge from the action of the hydrostatic pressure on the gate. What thickness would be needed if the gate is made of solid plate steel (density = 7.5 grams/cm)? Assume that the effects of air pressure on the gate can be neglected compared to the effects of water and that the density of water is  = 1,000 kg/m.
= 1,000 kg/m.
Show solution/hide solution.
The hydrostatic pressure is a linear function of depth , i.e.,  . Because the gate is at an angle, , to the vertical, the pressure force on the gate will depend on this angle. The lengths and are related by
. Because the gate is at an angle, , to the vertical, the pressure force on the gate will depend on this angle. The lengths and are related by  , where
, where  = 0.5/2.0 = 0.25, so the angle is 75.5
= 0.5/2.0 = 0.25, so the angle is 75.5 .
.
The hydrostatic pressure distribution acting over the gate along its length, , from the hinge will be
![\[ p = \varrho_w g \big( (h - H) + x \cos \theta \big) \]](https://eaglepubs.erau.edu/app/uploads/quicklatex/quicklatex.com-eb49ff1b21e85b79d8a5e90972a0f698_l3.svg "Rendered by QuickLaTeX.com")
The incremental hydrostatic force  on a short width (strip) of the gate
on a short width (strip) of the gate  will be
will be
![\[ dF_h = p W dx = \varrho_w g \big( (h - H) + x \cos \theta \big) W \, dx \]](https://eaglepubs.erau.edu/app/uploads/quicklatex/quicklatex.com-77735c967e2c3af90bf23dff39502a3f_l3.svg "Rendered by QuickLaTeX.com")
and the corresponding incremental moment (or torque)  about the hinge will be
about the hinge will be
![\[ dM_h= dF_h \, x = \varrho_w g \, W \big( (h - H) x + \cos \theta \, x^2 \big) \, dx \]](https://eaglepubs.erau.edu/app/uploads/quicklatex/quicklatex.com-0032acc84e7f713b86e9b5f1585ff7b5_l3.svg "Rendered by QuickLaTeX.com")
Therefore, the total hydrostatic moment (or torque)  about the hinge will be
about the hinge will be
![\[ M_h = \int_0^L \varrho_w g \, W \big( (h - H)x + \cos \theta \, x^2 \big) \, dx \]](https://eaglepubs.erau.edu/app/uploads/quicklatex/quicklatex.com-819774ffb0628b90b6b4b5a3a3072be3_l3.svg "Rendered by QuickLaTeX.com")
which, after integration, becomes
![\[ M_h = \varrho_w g \, W \bigg[ \frac{(h - H) x^2}{2} + \frac{\cos \theta \, x^3}{3} \bigg]_{0}^{L} \]](https://eaglepubs.erau.edu/app/uploads/quicklatex/quicklatex.com-c825ebad039c653794a550189efa47a7_l3.svg "Rendered by QuickLaTeX.com")
and so
![\[ M_h = \varrho_w g W \bigg( \frac{(h - H) L^2}{2} + \frac{\cos \theta \, L^3}{3} \bigg) \]](https://eaglepubs.erau.edu/app/uploads/quicklatex/quicklatex.com-cb15ebf45a941fccf69f432621a9e84b_l3.svg "Rendered by QuickLaTeX.com")
Substituting values gives
![\[ M_h = 1,000 \times 9.81 \times 4.0 \bigg( \frac{(10.0 - 0.5) 2.0^2}{2} + \frac{0.25 \times 2.0^3}{3} \bigg) = 771.73~\mbox{kNm} \]](https://eaglepubs.erau.edu/app/uploads/quicklatex/quicklatex.com-3937f481b6f698e120136a2fcb47bd36_l3.svg "Rendered by QuickLaTeX.com")
The weight  of the steel gate will be
of the steel gate will be
![\[ W_s = \varrho_s L \, W \, t \, g \]](https://eaglepubs.erau.edu/app/uploads/quicklatex/quicklatex.com-edfd59bb1f3f0c7deddd50e60304d95a_l3.svg "Rendered by QuickLaTeX.com")
where  is the thickness of the plate. So, the gravity moment of the plate about the hinge will be
is the thickness of the plate. So, the gravity moment of the plate about the hinge will be
![\[ M_s = W_s \left( \frac{L}{2} \right) \sin \theta = \varrho_{s} L \, W \ t \ g \left( \frac{L}{2} \right) \sin \theta \]](https://eaglepubs.erau.edu/app/uploads/quicklatex/quicklatex.com-70f957883fb0d25a7750ee50400f45bb_l3.svg "Rendered by QuickLaTeX.com")
If everything is just in a moment balance, then  , so the needed thickness of the plate is
, so the needed thickness of the plate is
![\[ t = \frac{M_h}{\varrho_s L \, W \, g \displaystyle{\left( \frac{L}{2} \right)} \sin \theta} \]](https://eaglepubs.erau.edu/app/uploads/quicklatex/quicklatex.com-0aead8c86bfe8fe5702f6e8807e6605e_l3.svg "Rendered by QuickLaTeX.com")
The density of steel is 7.5 grams/cm = 7,500 kg/m . Also,
. Also,  = 0.968. So, after substituting the numerical values, then
= 0.968. So, after substituting the numerical values, then
![\[ t = \frac{771,730}{7,500 \times 2.0 \times 4.0 \times 9.81\displaystyle{\left( \frac{2.0}{2} \right)} 0.968} = 1.35~\mbox{m} \]](https://eaglepubs.erau.edu/app/uploads/quicklatex/quicklatex.com-8e5134f2549251b4f1b7116b0a2918bd_l3.svg "Rendered by QuickLaTeX.com")
So, a very heavy, thick steel gate is needed.
Piezometer Tube
A piezometer tube is a straightforward device used to measure the static pressure of a fluid at a specific point in a pipe, tube, duct, or other application. Its operation is based on the principle that the pressure at a point in a fluid is proportional to the height of the fluid column above that point, as shown in the figure below.
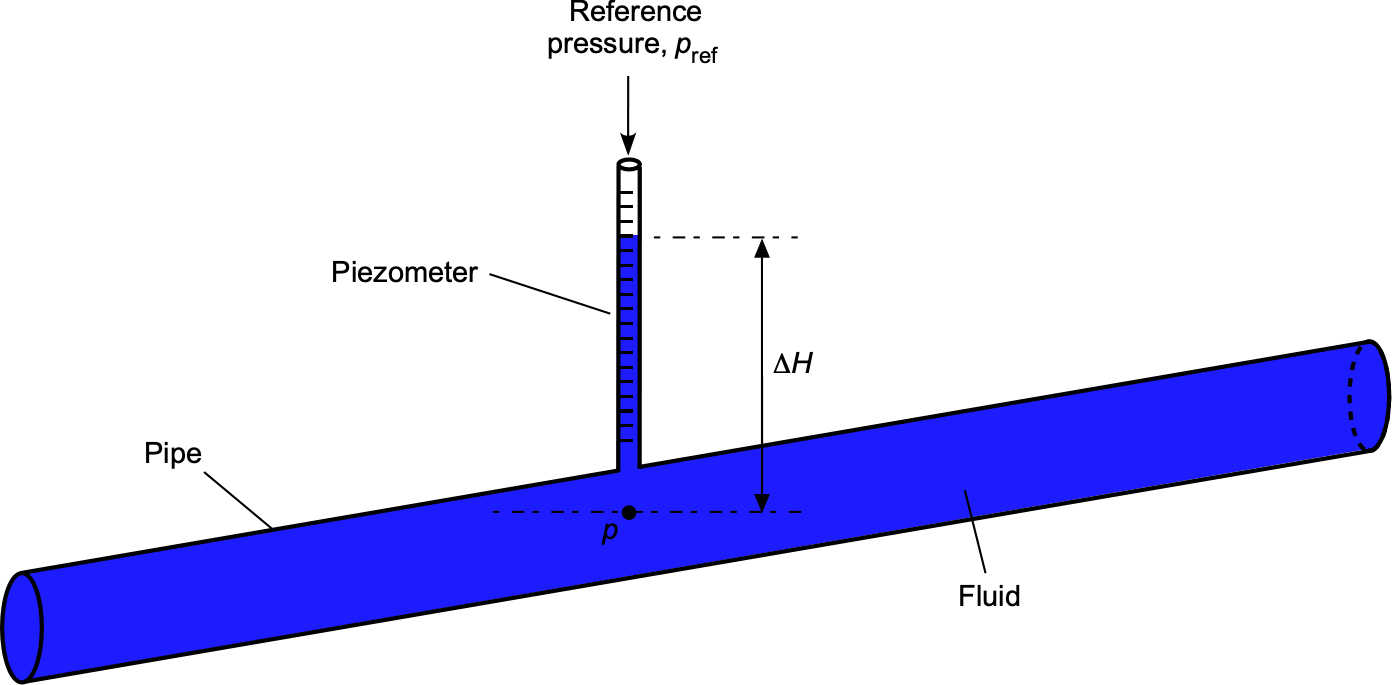
The height measurement taken on the piezometer can be used to calculate the pressure head, also known as the piezometric head, at the point of measurement. The pressure head,  , is the difference between the external reference pressure,
, is the difference between the external reference pressure,  , and the pressure in the fluid, , and is given by
, and the pressure in the fluid, , and is given by
(70) 
where would usually be atmospheric (ambient) pressure, i.e., 
 . The reading is therefore referred to as gauge (or gage) pressure. Piezometers are the simplest type of pressure measurement device. They work with both stagnant (stationary) and flowing fluids. Today, piezometers come in various types, including solid-state versions.
. The reading is therefore referred to as gauge (or gage) pressure. Piezometers are the simplest type of pressure measurement device. They work with both stagnant (stationary) and flowing fluids. Today, piezometers come in various types, including solid-state versions.
U-Tube Manometer
A U-tube manometer is the oldest and most basic type of pressure-measuring instrument, and it remains in use today as a reference instrument because of its inherent accuracy. A U-tube manometer is simply a glass tube with a “U” partially filled with a liquid, as shown in the figure below. This liquid, often referred to as the manometric liquid, may be water, alcohol, oil, mercury (rarely used today), or some other liquid of known density. Light manometric liquids, such as water, are used to measure minor pressure differences, while heavier liquids are employed for more significant pressure differences. This type of manometer has no moving parts and requires no formal calibration, except for the use of an accurate length scale. The scale may be a simple ruler or a more sophisticated vernier scale.
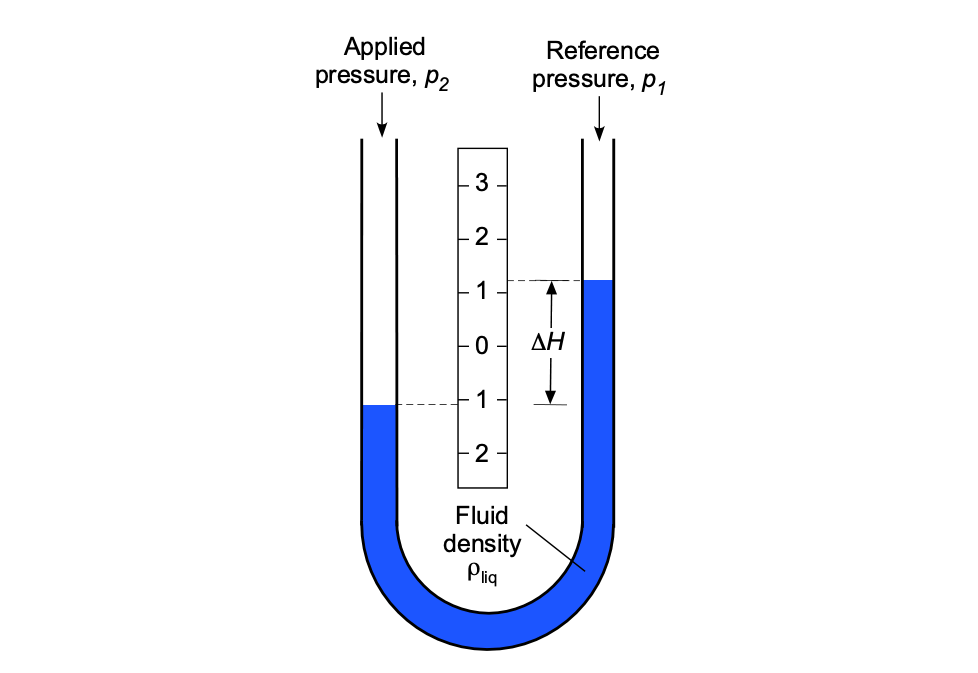
Operating Principle
Liquid manometers measure differences in pressure by balancing the weight of a manometric liquid between the two applied gas (or air) pressures. The height difference between the liquid levels in the U-tube’s two legs (or arms) is proportional to the air pressure difference; therefore, the height difference can be related to the differential pressure.
Using one arm of the manometer as a reference, such as , which could continue to be open to the atmosphere or connected to another (known) reference gas pressure, and connecting the other arm to an unknown applied pressure, m then the difference in the column heights,  , is proportional to the difference in the two pressures, i.e.,
, is proportional to the difference in the two pressures, i.e.,
(71) 
where  is the density of the manometric liquid used in the U-tube. Notice that a pressure value measured with respect to atmospheric pressure is referred to as gauge (or gage) pressure. If the reference pressure is a vacuum, the pressure is called absolute pressure.
is the density of the manometric liquid used in the U-tube. Notice that a pressure value measured with respect to atmospheric pressure is referred to as gauge (or gage) pressure. If the reference pressure is a vacuum, the pressure is called absolute pressure.
The figure below summarizes the changes in liquid levels in a U-tube manometer when the applied air pressure is greater than, equal to, or less than the reference pressure . For example, if the openings of each arm of a U-tube manometer are exposed to the same pressure, then the heights of the liquid columns will be equal. Increasing the pressure applied to one arm or the other will produce a difference in the manometric fluid level.
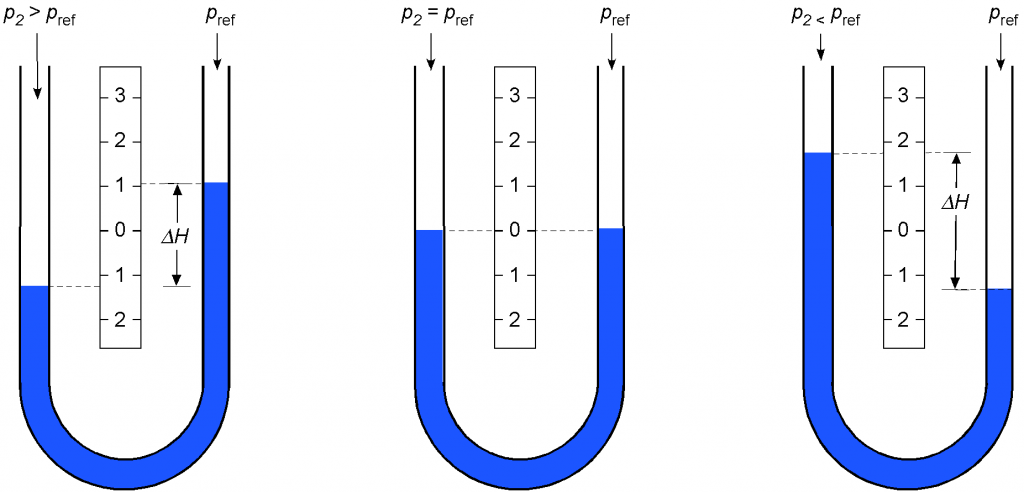
Remember that a liquid manometer measures pressure by the difference in column heights of the manometric fluid, often expressed in inches or centimeters at a specific temperature. The height measurements are easily converted to standard pressure units using appropriate conversion factors, e.g., 1 inch of water equals 5.1971 lb/ft or 0.0361 lb/in.
or 0.0361 lb/in.
“Rules” of Manometry
Several basic principles or “rules” of manometry directly follow when using the constant density solution to the aero-hydrostatic equation, i.e., p +  . Learning how to use these rules properly is obtained by studying exemplar problems in hydrostatics. These rules are:
. Learning how to use these rules properly is obtained by studying exemplar problems in hydrostatics. These rules are:
-
- The pressure at two points 1 and 2 in the same fluid at the same height is the same if a continuous line can be drawn through the fluid from point 1 to point 2, i.e., = if
 =
=  .
. - Any free surface of a fluid open to the atmosphere is subject to atmospheric pressure, .
- In most practical hydrostatic problems involving air, the atmospheric pressure can be assumed constant at all heights unless the vertical change is significant, e.g., more than a few feet or meters.
- For a liquid in a container, the shape of the container does not matter in hydrostatics, i.e., the pressure at a point in the liquid depends only on the vertical height of the fluid above it. This result is called the hydrostatic paradox.
- The pressure is constant across any flat fluid-to-fluid interface.
- The pressure at two points 1 and 2 in the same fluid at the same height is the same if a continuous line can be drawn through the fluid from point 1 to point 2, i.e.,
Variations of U-tube Manometers
Many variations of the basic U-tube manometer concept include inverted, inclined, and reservoir or well-type manometers. All manometers respond to changes in pressure by vertical changes in fluid height.
Inverted Manometer
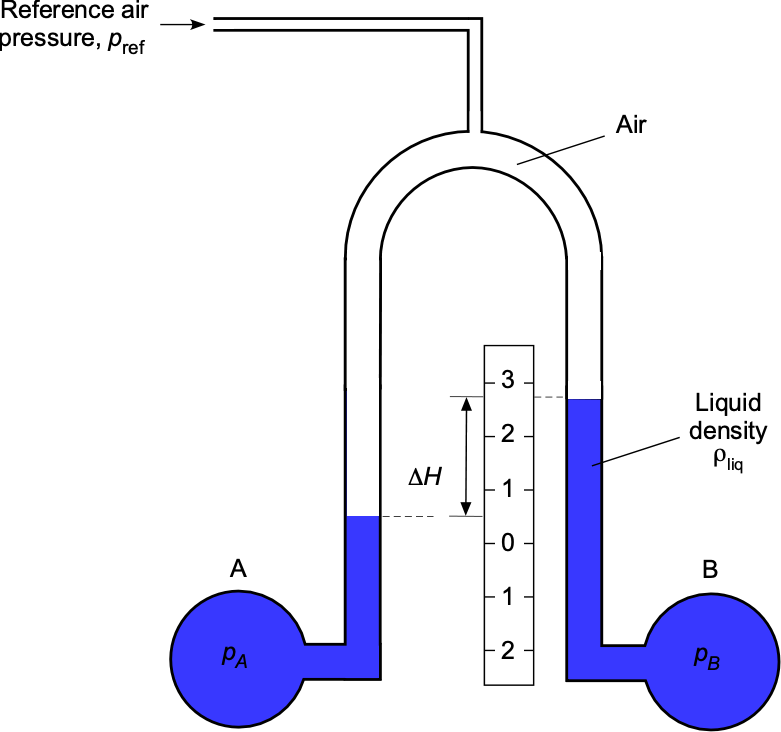
An inverted U-tube manometer is often used to measure pressure differences in liquids. The space above the liquid in the manometer is filled with air at a known reference pressure, which can be adjusted to balance the liquid levels and adjust the manometer’s sensitivity. When the pressure at B is higher than at A, the liquid in the U-tube is displaced, creating a difference in the liquid levels in the two arms of the tube. The difference in the liquid levels is directly proportional to the pressure difference between the two points, i.e.,
(72) 
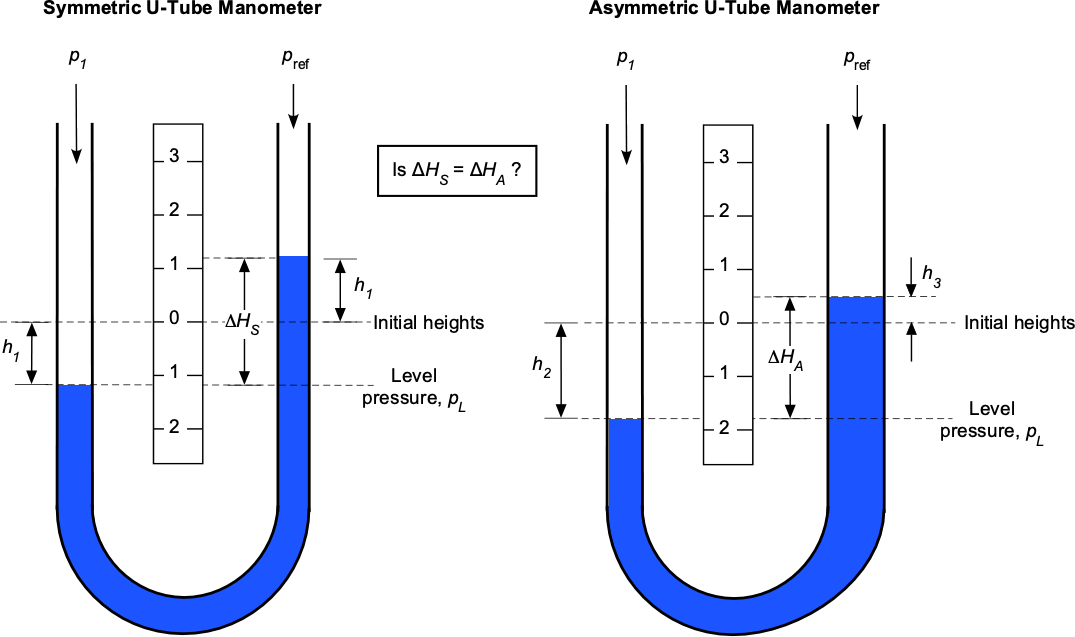
Asymmetric Manometers
Asymmetric manometers are sometimes encountered, where one arm of the manometer has a different cross-sectional area than the other, as shown in the figure below. The natural question that arises, therefore, is whether the difference in the two fluid levels is the same as that of a symmetric manometer for a given air pressure difference.
 and
and  equal for a given pressure difference?
equal for a given pressure difference?In the case of the symmetric manometer, it will be apparent that for a given air pressure difference,  , the liquid level on the left arm will drop by the same amount,
, the liquid level on the left arm will drop by the same amount,  , as the level increases on the right arm, i.e., conservation of mass and volume (both are conserved for a liquid). Therefore, applying hydrostatic principles to the right arm of the symmetric manometer at a level pressure gives
, as the level increases on the right arm, i.e., conservation of mass and volume (both are conserved for a liquid). Therefore, applying hydrostatic principles to the right arm of the symmetric manometer at a level pressure gives
(73) 
ignoring any hydrostatic effects of the air. Applying hydrostatic principles to the left arm of the symmetric manometer, then at the level pressure values
(74) 
(75) 
In the case of the asymmetric manometer, the liquid level in the right arm will not rise as far as it does in the symmetric manometer. However, to satisfy the conservation of volume, the level in the left arm must drop more, i.e.,  and
and  . Applying hydrostatic principles to the right arm of the asymmetric manometer at the level pressure, then
. Applying hydrostatic principles to the right arm of the asymmetric manometer at the level pressure, then
(76) 
again, ignoring any hydrostatic effects of the air. Applying hydrostatic principles to the left arm of the asymmetric manometer, then
(77)
as before. Therefore, in this case
(78) 
Finally, equating Eq. 75 obtained for the symmetric manometer and Eq. 78 for the asymmetric manometer gives
(79) 
proving that is equal to for the same  . The conclusion is that regardless of the cross-sectional areas of the arms of a U-tube manometer, a given applied differential pressure will create the same height difference on the liquid levels, even though the levels themselves will be different (conservation of mass or volume) compared to the case where the legs have the same area.
. The conclusion is that regardless of the cross-sectional areas of the arms of a U-tube manometer, a given applied differential pressure will create the same height difference on the liquid levels, even though the levels themselves will be different (conservation of mass or volume) compared to the case where the legs have the same area.
Well Manometer
The simple U-tube manometer has a significant disadvantage because the liquid levels in both arms must be read and recorded to calculate the pressure. By making the diameter of one arm much larger than the other, the manometric liquid level will fall very slightly on that arm compared to the more significant rise in the other arm. This principle is used in a well-type or reservoir-type manometer, as shown in the image below, which is just another variation of the asymmetric manometer.
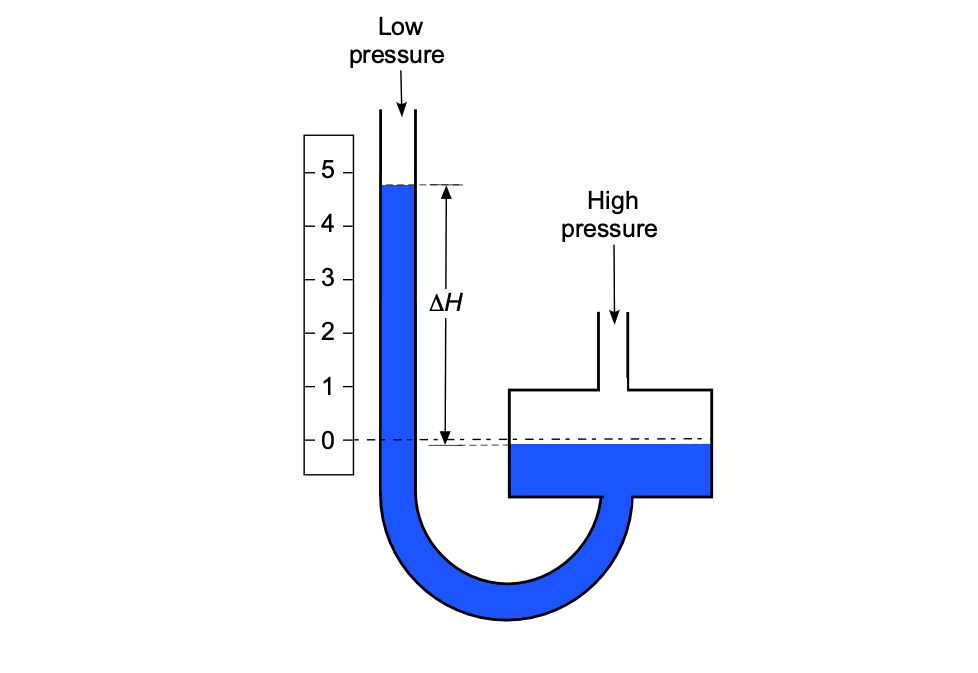
In this case, the drop in the liquid level of the well can be ignored in any practical sense. The differential pressure can then be obtained in the standard way by measuring the change in the fluid level in the well relative to the vertical height of the column, i.e.,
(80) 
Some well manometers used for high accuracy may require a slight adjustment, as the scale’s datum can be moved to “zero” the reading relative to the well level. In either case, only one reading on the scale is required to determine the differential pressure. Well-type manometers are often used to measure low-pressure differentials or as calibration manometers, but they are not limited to these uses.
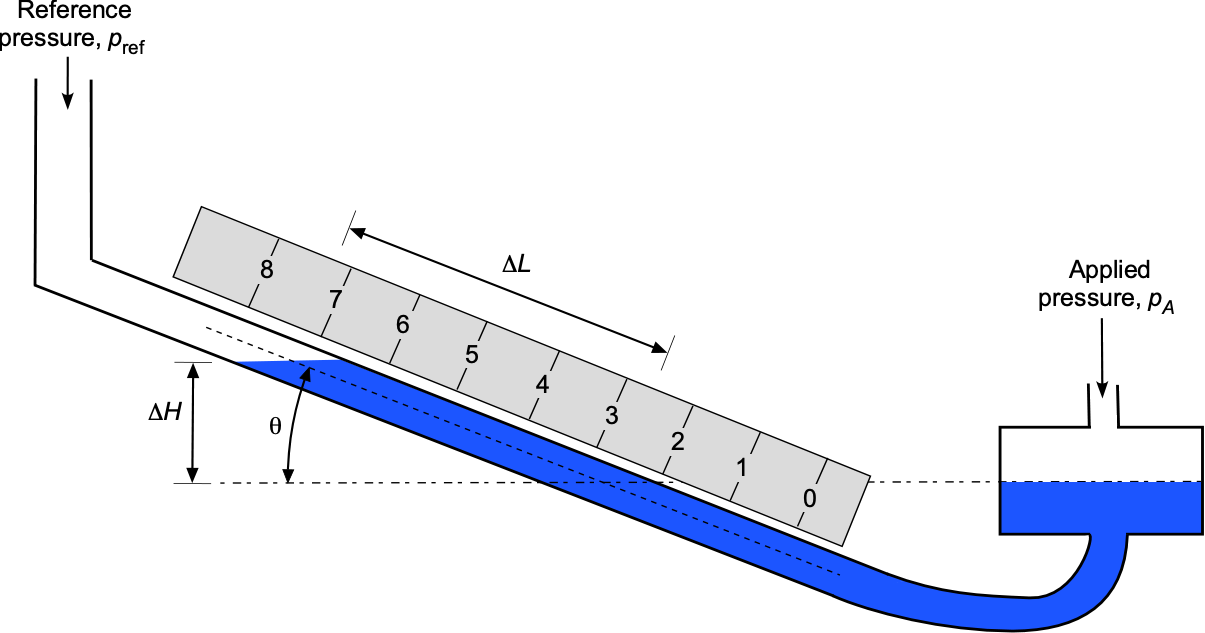
Inclined Manometer
With an inclined manometer arm, as shown below, a vertical change in the fluid levels is stretched over a longer length. Consequently, an inclined-arm manometer has better sensitivity for measuring lower pressures, i.e.,
(81) 
This means that the length along the arm is “magnified” according to
(82) 
For example, if  then
then  . Because the fluid level moves further along the arm for a given pressure difference, it is easier to measure on the scale.
. Because the fluid level moves further along the arm for a given pressure difference, it is easier to measure on the scale.
Bank Manometers
Liquid manometers are helpful in many applications, but they have limitations due to their large size, bulkiness, and suitability for laboratory rather than routine field use. They also come in large banks suitable for use in the wind tunnel, as shown in the photograph below. One side of the manometer bank is referenced to static pressure through a plenum containing the manometer liquid (usually water with a dye added), much like a well-type manometer. Each individual manometer is connected to a separate pressure tap, such as on a wing. The process remains the same because the pressure is proportional to the height of the fluid column, which can be measured with a scale. Such types of manometers, however, take a very long time to read and cannot be interfaced with a computer other than manually.

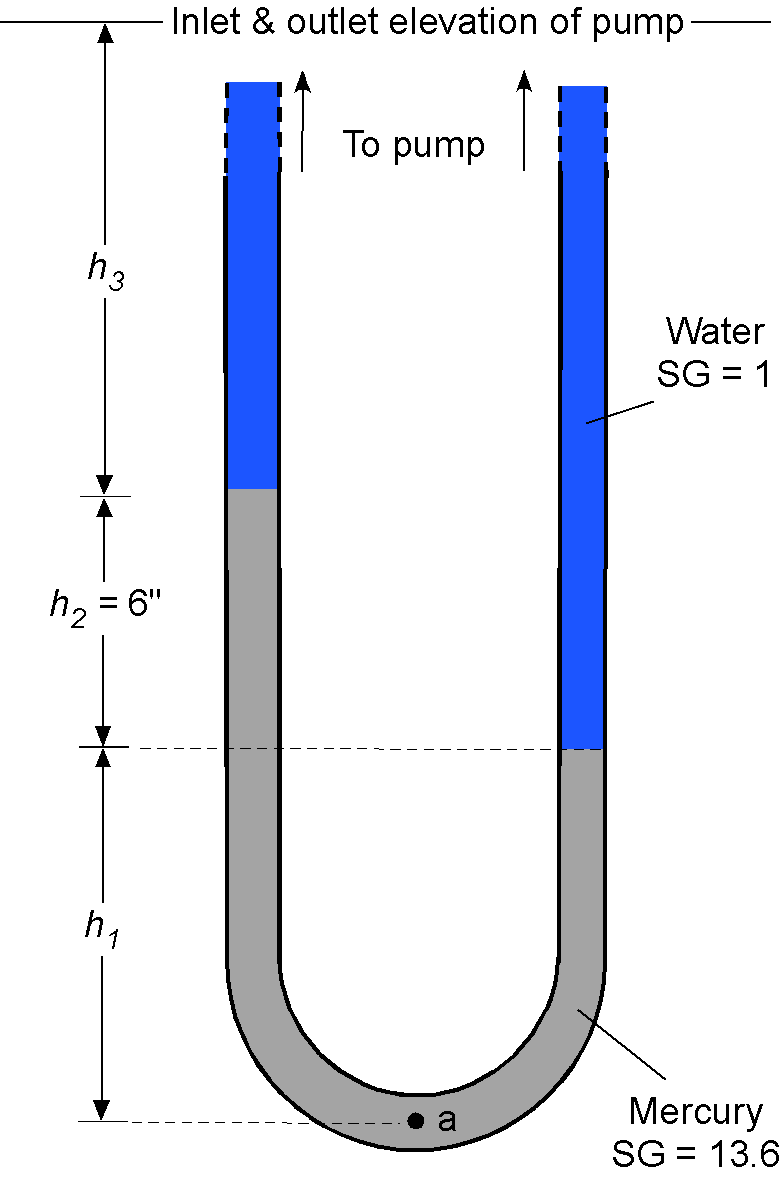
Check Your Understanding #6 – Use of a U-tube manometer
A U-tube manometer is connected to the inlet and outlet of a water pump, as shown in the figure below. The left side is connected to the inlet at pressure  , and the right side is connected to the outlet at pressure
, and the right side is connected to the outlet at pressure  . Assuming that the inlet and outlet conditions are at the same elevation, determine the pump’s pressure increase. Remember that specific gravity SG =
. Assuming that the inlet and outlet conditions are at the same elevation, determine the pump’s pressure increase. Remember that specific gravity SG =  . The density of water can be assumed to be 1.93 slugs/ft.
. The density of water can be assumed to be 1.93 slugs/ft.
Show solution/hide solution.
The pressure at point “a” will equal the pressure produced by each arm of the U-tube manometer. For the left arm, then
![\[ p_a = \varrho_{\rm Hg} \, g \, h_1 + \varrho_{\rm Hg} \, g \, h_2 + \varrho_{\rm H_{2}O} \, g \, h_3 + p_{\rm in} \]](https://eaglepubs.erau.edu/app/uploads/quicklatex/quicklatex.com-7f4d1b2f5b45a744380f0ef0f763117e_l3.svg "Rendered by QuickLaTeX.com")
Similarly, for the right arm, then
![\[ p_a = \varrho_{\rm Hg} \, g \, h_1 + \varrho_{\rm H_{2}O} \, g \, h_2 + \varrho_{\rm H_{2}O} \, g \, h_3 + p_{\rm out} \]](https://eaglepubs.erau.edu/app/uploads/quicklatex/quicklatex.com-3ebd162cf15393e10cdae78c5afa71f6_l3.svg "Rendered by QuickLaTeX.com")
Therefore, the difference in pressure becomes
![\[ \Delta p = p_{\rm out} - p_{\rm in} = \varrho_{\rm Hg} \, g \, h_2 - \varrho_{\rm H_{2}O} \, g \, h_2 = \left( \varrho_{\rm Hg} - \varrho_{\rm H_{2}O} \right) g \, h_2 \]](https://eaglepubs.erau.edu/app/uploads/quicklatex/quicklatex.com-93dddaaa488936ab0d4fcfc35e4a6176_l3.svg "Rendered by QuickLaTeX.com")
or
![\[ \Delta p = \left( SG_{\rm Hg} - SG_{\rm H_{2}O} ) \varrho_{\rm H_{2}O} \right) g \, h_2 \]](https://eaglepubs.erau.edu/app/uploads/quicklatex/quicklatex.com-c6400e6a4d05ea23d24f5349c457e160_l3.svg "Rendered by QuickLaTeX.com")
Substituting the known numerical values gives
![\[ \Delta p = \left( 13.6 - 1.0 \right) \times 1.93 \times 32.17 \times (6.0/12) = 391.16~\mbox{lb/ft${^{2}}$} \]](https://eaglepubs.erau.edu/app/uploads/quicklatex/quicklatex.com-fc580f2aafd97d4093e2da2fe72f60ac_l3.svg "Rendered by QuickLaTeX.com")
Pressure Transducers
The schematic below illustrates that a pressure sensor or pressure transducer is a solid-state device used for measuring pressure. A pressure sensor generates a voltage or other analog signal that is a function of the pressure imposed upon it. The sensor must be calibrated by applying known pressures and recording the output voltage; the resulting relationship is known as the calibration function. This relationship is usually linear, so a single constant or calibration coefficient represents the behavior. The sensor’s signal may also be conditioned by amplification and filtering, then converted to digital form through an analog-to-digital (A/D) converter before being stored on a computer.
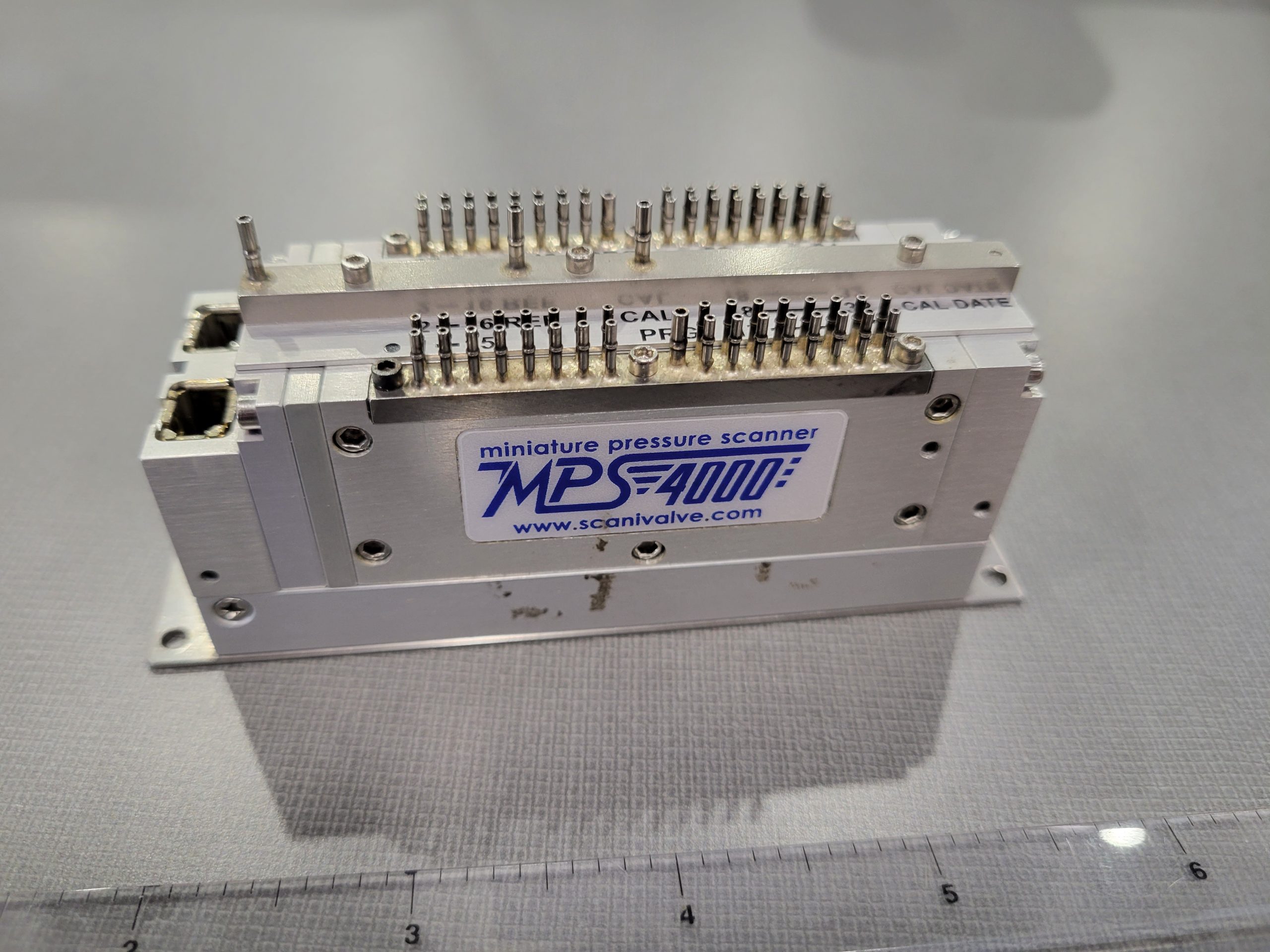
Digital pressure manometers are also available in convenient, portable, battery-powered sizes for ease of use, with single or multiple inputs and outputs for controlling measurements and transferring data. In addition, calibrations or correction factors can be incorporated into the software used to manage the digital manometer. Today, pressure sensors are utilized in thousands of industrial applications and are available in various sizes, shapes, and pressure ranges. Miniature pressure transducers are often used in aerospace applications because of their low weight and ability to be placed closely together, such as over the surface of a wing. In wind tunnel applications, pressure transducer modules, such as the one shown below, are often used. Pressure tubes can be connected to each port, and the module has self-contained electronics that allow it to read digital pressure values directly from a computer and store them for analysis.
Hydraulic Press
A hydraulic press is a device that utilizes the basic principles of hydrostatics to amplify a relatively small input force applied to a piston in a primary cylinder into a significantly larger output force applied to a piston in a secondary cylinder. This concept is called mechanical advantage. It is widely used in the design of hydraulic systems to generate larger mechanical forces where needed, as shown in the figure below. This approach can be applied to various tools, machinery, and aircraft components, including landing gear, flaps, flight control surfaces, and brakes.
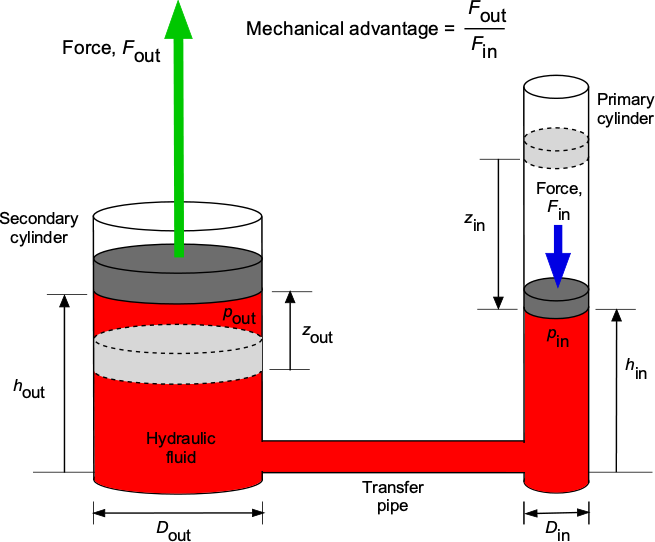
The fluid is a form of hydraulic oil, which can be considered incompressible, with a density of  . The system comprises two cylinders of different diameters,
. The system comprises two cylinders of different diameters,  and
and  , respectively, each filled with hydraulic fluid and capped with a tight-fitting piston that slides within the cylinder. The applied force,
, respectively, each filled with hydraulic fluid and capped with a tight-fitting piston that slides within the cylinder. The applied force,  , on the primary piston causes it to move downward, which in turn drives the fluid through a transfer pipe into the secondary cylinder. The force on the primary piston also increases the pressure, which is transmitted hydrostatically to the secondary piston, resulting in the exact change in pressure there. The secondary piston has a larger area, providing a larger force,
, on the primary piston causes it to move downward, which in turn drives the fluid through a transfer pipe into the secondary cylinder. The force on the primary piston also increases the pressure, which is transmitted hydrostatically to the secondary piston, resulting in the exact change in pressure there. The secondary piston has a larger area, providing a larger force,  , for the same pressure.
, for the same pressure.
Assume the system is initially in hydraulic equilibrium with no forces acting on either piston. The force applied to the primary piston moves it down by a distance , increasing the pressure below the piston to
(83) 
On the secondary or output side, the pressure below the piston is
(84) 
Also, it will be apparent that because the pressures at the same height in the same fluid are equal, then
(85) 
Therefore, introducing the pressure values in terms of forces gives
(86) 
or
(87) 
If the difference in hydrostatic pressure head,  , can be assumed to be small compared to the pressure applied by the forces, which is easily justified, then
, can be assumed to be small compared to the pressure applied by the forces, which is easily justified, then  , and so
, and so
(88) 
This means that the output force on the secondary piston is
(89) 
Therefore, input force, , will be multiplied by the ratio of the areas or the square of the diameter ratios of the primary and secondary cylinders to give a higher output force, . For example, if  , then
, then  and so a mechanical advantage of 5.
and so a mechanical advantage of 5.
Notice that the distance the primary piston must move in its cylinder is greater than the distance the secondary piston moves. The volume of fluid shared below the two pistons is conserved (oil is incompressible), i.e.,
(90) 
so that
(91) 
If  , then
, then  , so the primary piston must move five times as far, which is the price to pay for a mechanical advantage.
, so the primary piston must move five times as far, which is the price to pay for a mechanical advantage.
The problem can also be approached using the conservation of energy. The work done by the force on the primary piston must appear as work by the secondary piston, assuming no losses in the fluid transfer, i.e.,
(92) 
Therefore, the same result of the multiplication of forces is obtained, i.e.,
(93) 
Summary & Closure
The principles of hydrostatics apply to stationary or stagnant fluids, i.e., fluids with no relative motion between their elements. Therefore, these fluid problems are easier to understand and predict. The problems that can be analyzed using hydrostatics include buoyancy, determining pressures on submerged objects or inside fluid-filled containers, and any other fluid problem in which the fluid is not in motion or is stagnant. Besides pressure, other fluid properties of interest are temperature and density. The essential equations to remember are those for the hydrostatic pressure field and the aero-hydrostatic equation. The latter is a particular case of the former when gravity is the only acting body force. The equation of state is also helpful in analyzing hydrostatic problems, which can be used to relate pressures, densities, and temperatures in a gas. Another application of the aero-hydrostatic equation is to aid in analyzing the properties of the Earth’s atmosphere and those of other planets’ atmospheres.
5-Question Self-Assessment Quickquiz
For Further Thought or Discussion
- A balloon filled with helium is released at sea level. What happens to the balloon?
- Can a lead balloon float? Be sure to explain any assumptions you may use.
- A cylindrical container, or bucket, filled with water, is rotated. What happens to the shape of the water’s surface?
- In a density-stratified water container, the density varies with depth according to
 = 1000 + 1.1 for 0 < < 100 m, where = 0 is the surface. Show how to determine the pressure field.
= 1000 + 1.1 for 0 < < 100 m, where = 0 is the surface. Show how to determine the pressure field. - Sometimes, an inclined manometer is used to measure pressure. Explain why.
- Explain the principle of a hydraulic lift for obtaining a large force from a small force.
- A cruise ship weighs 100,000 tons. How much volume of seawater does it displace?
- Precision liquid manometers are still used today, which may seem inconvenient, but they are not outdated. Explain why.
- What factors influence the stability of floating objects? How can you determine the equilibrium position of a floating body and its stability conditions?
Additional Online Resources
To improve your understanding of hydrostatics, take some time to navigate to some of these online resources:
- Wikipedia has a good site on hydrostatics.
- Video on the concept of hydrostatic pressure from the University of Colorado.
- Video on visualizing the idea of hydrostatic pressure.
- For an interactive demonstration about hot air balloons, see: How do you control a hot air balloon?
- For more on Archimedes and his principle, check out Eureka! The Archimedes Principle.
- Pascal’s principle, hydrostatics, atmospheric pressure, lungs, and tires. Good lecture and demonstrations.
- Hydrostatics, Archimedes’ Principle: What makes your boat float? Good lecture and excellent demonstrations.
